Set FENCE_ENABLE = 0 (disabled)
FENCE_ALT_MAX = 555
FENCE_RADIUS = 555
BRD_RADIO_TXMAX = 8
PILOT_VELZ_MAX = 900
. . . but cannot get above 131ft altitude?
Suggestions?
Ok . . . reset to factory defaults then changed FENCE_ENABLE = 0 (disabled) only
Did get to 151’ but still nowhere near the +200 others are getting.
Have not used Mission Planner yet but would that allow almost un-limit altitude settings within battery range?
You have to remember that the failsafe will not let you go beyond signal strength of the controler. So you could disable the fence. But if it detects a drop in signal from the controler it will just stop going any higher. You would need to find a way to increase the signal distance. Or it could also be interference from a nearby source, so try other locations to make sure signal has no interference.
I’ve only managed 163.9 then I got the controler telling me i had lost signal.
Did you try changing BRD_RADIO_TXMAX to 8?
That was about all I changed except disabling FENCE_ENABLE = 0 (disabled) to get from 130’ to 151’ and not changing FENCE_ALT_MAX or FENCE_RADIUS which it appears FENCE_ENABLE overrides anyway.
I didnt change any fence settings, I just disabled it.
How about the transmitter output BRD_RADIO_TXMAX?
So much for that . . . BRD_RADIO_TXMAX . . . 1 or 4 or 8 makes no difference with range.
The fence is unrelated to loss of signal failsafe. Even if you were to establish an 800 ft fence radius, the Viper will head for home if it loses command control signal. If a home has not been established because you have launched before GPS lock has been established, it will just land if out of signal range. However, Mission Planner can be set to ignore loss of control signal if the Viper is flying under GPS control on a planned Mission. It does not need a control signal to guide it since the flight plan is on board and MP is providing the instructions.
Try setting up a flight plan with a waypoint near your takeoff point and set an altitude of 200’ or whatever is your local limit. Battery capacity and air density should be the limit.
I have not tried testing altitude limits but I have flown missions well beyond the horizontal signal range.
2 Likes
Thanks Jerry . . . haven’t flown my maiden mission yet but your points are noted.
So I disabled the fence and then set the fence to 500 and the radius to 500 and this is what I got. Will see if I can set the numbers higher and see what happens
@Thomas_Ritchie . . . . where was the 326.5 before or after? The 131 is what I get using default values . . . 151ft is the best I can get using 500 for fence & radius.
You probably won’t get any higher than that using the controller, cuz you’ll lose signal.
But you could potentially get higher by using Mission Planner and runnuing a mission up to a higher altitude. You’ll need to change the Parameter FS_THR_ENABLE to 2 - Enabled Continue with Mission in Auto Mode.
There is a risk here of course. If you set the Waypoint height to 1000ft, and it can’t get there…it’ll keep trying until the battery dies…and if it is out of radio range, you won’t be able to call it back.
When the battery does die in that scenario, would it be a hard landing, or is there a Failsafe to just Land? I haven’t tried yet, but when I lose contact at night and the SV lights are blinking off in the distance, would it return if I powered off the controller?
If there battery dies, the motors die, the quad dies
No Failsafe option can be programmed using MP to prevent hard landing?
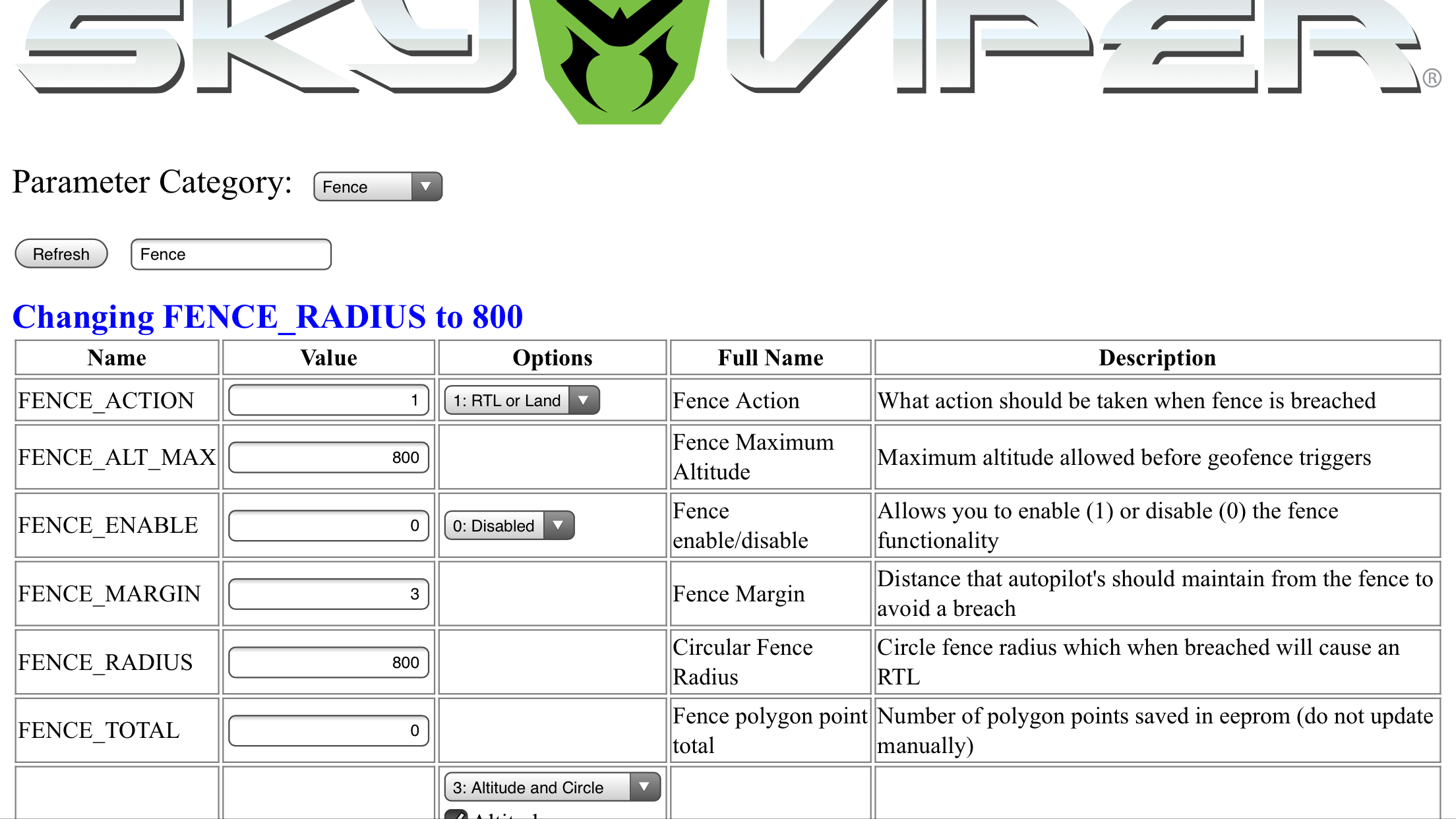
The 326.5 was after I changed the fence settings. Whenever I start it up I have to change the fence settings if I want to go past 131 feet. I changed them to 800 right now and I know it went above 326 because I could barely see it and not hear it at all but the controller wouldn’t give me a reading. So fence alt 800, fence disabled and fence radius 800
Enjoy!
Nice . . . I couldn’t get that high doing the same things . . . go figure. I’m not sure if FENCE_ALT_MAX and FENCE_RADIUS values matter if FENCE_ENABLE is disabled?
I’ll try with Mission Planner . . . doing only my second mission tomorrow, a one-way of 1.1 miles with Rally Points so it doesn’t try to go home if the bat runs low. Wish me luck!
What you DO have for a failsafe is a battery low voltage failsafe.
BATT_FS_LOW_ACT - This is the FIRST alert of battery low. It is triggered below BATT_LOW_VOLT
(Note: You may not want to react to this first one. On my SV, I’ve found that if you go “Fast” that’ll the battery Volt will temporarily drop below this and cause Low alert, but then will go back up when you release the throttles.)
BATT_FS_CRT_ACT - This is the last chance to get on the ground. It is triggered below BATT_CRT_VOLT
BTW, this is only specific to the SV. Each craft is build differently. For example, the 3DR Solo has a SMBus smart battery to tell when the battery is low. Other crafts may have both current and voltage sensors, etc.
So far I have flown at an altitude of 400 feet, and as far as 1,953 feet. I didn’t disable the fence, just set the max higher as well as removing the radio failsafe. Of course you can only fly it with a mission controller at that point.
1 Like
Which radio FailSafe did you adjust?
The best I’ve done is 2245’ @80’ (going for distance) but it should be able to go 4x further judging by battery life.
2 Likes