Hello,
I’m trying to setup a skid rover as in documentation but it seams like the servo output stop following the RC input and I don’t understand why.
Please your help
Thank you
Rotem
Hello,
I’m trying to setup a skid rover as in documentation but it seams like the servo output stop following the RC input and I don’t understand why.
Please your help
Thank you
Rotem
Can you provide a lot more information?
Hello David,
OK…
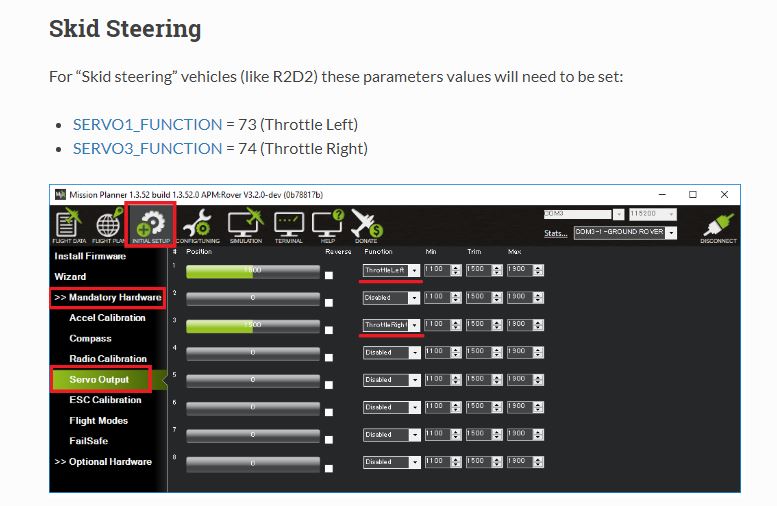
I’ve connected my Taranis to a pixhawk board, perfom redio calibration (all required channels are calibrated and functional), then going to the Servo output section and when I’m moving the Ail stick (channel 1) the servo from output1 is responding, channel 3 (throttle) is not responding.
Then setting servo1 = Throttle Left and servo3 = Throttle Right, after this settings (as in the attached image) both servos are not responding.
Thank you for your help
Rotem
Throttle outputs are not active as long as the pixhawk is disarmed.
Sounds like its not armed as count74 said. Is there a special reason you are using 3.2.0-dev?
Hello,
You are right…
I had two issues:
Thank you very much for your help
Rotem
Hi, I can arm the F4BY by holding the steering stick to right fully but can not disarm it by holding the steering stick to left, could you help me with this? Thanks
Just cofigure a switch for Arm/Disarm. No reason not to really for a Rover or Boat. Or if it’s a Skid Steer vehicle put it in Hold mode 1st.
Thanks, it did work. But I could not configure a switch for Arm/Disarm using Mission Planner 1.3.62
That’s simple to configure. I have the switch on Chan 7:
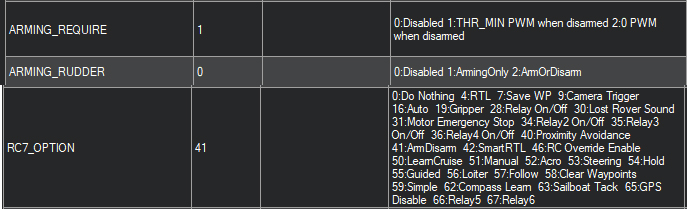
Don’t use the Basic Tuning screen, configure it in the full parameter list as I indicated. Also, frequently update Mission Planner. It’s a fairly common occurrence that Mission Planner falls behind the Dev version of Ardupilot. There are posts like yours every few days “why is this parameter grayed out”.