I set up my skid rover, first of all, I set up manually: Radio + Roboclaw, and works perfect,
When I set up with Pixhawk, something strange happens:
1º When I test Motors C all wheels move forward, If I test motor D left and right moves opposite
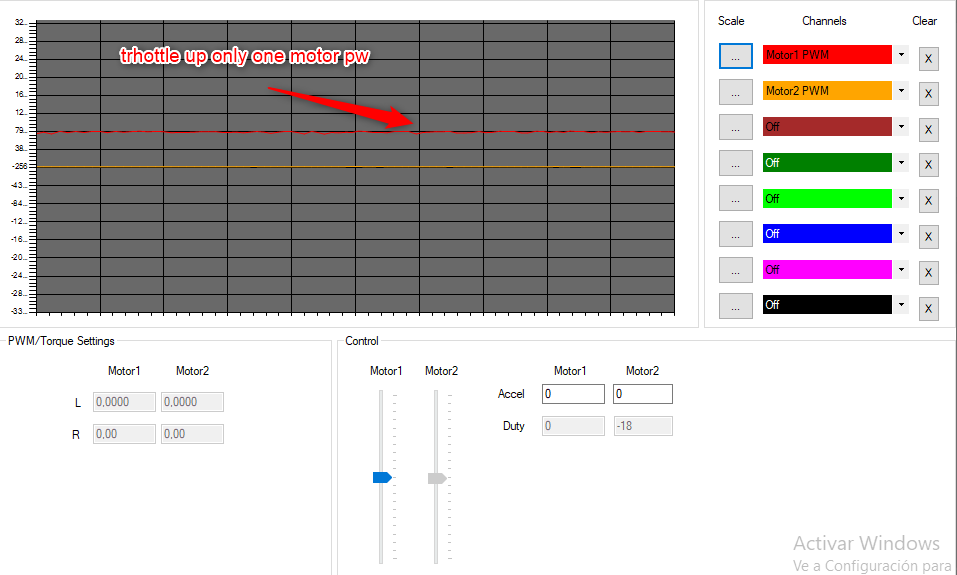
2º When I want to move the rover manually, When I Move the throttle stick up only move forward right wheels, left remains to stop, when I move right stick at right the left wheels move forward and the right ones remains to stop
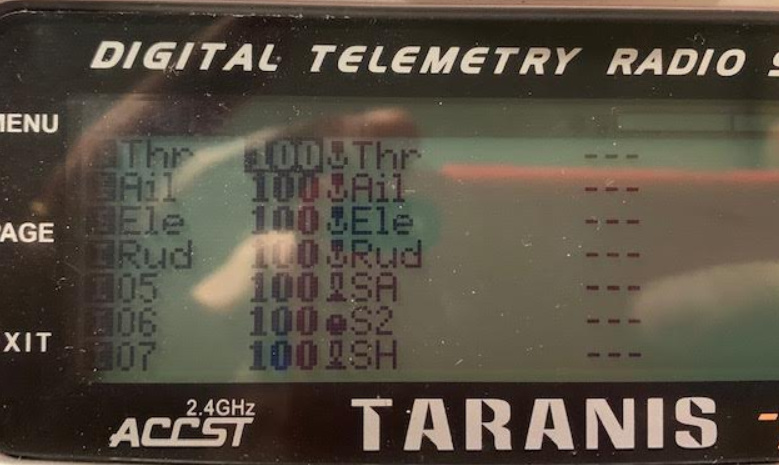
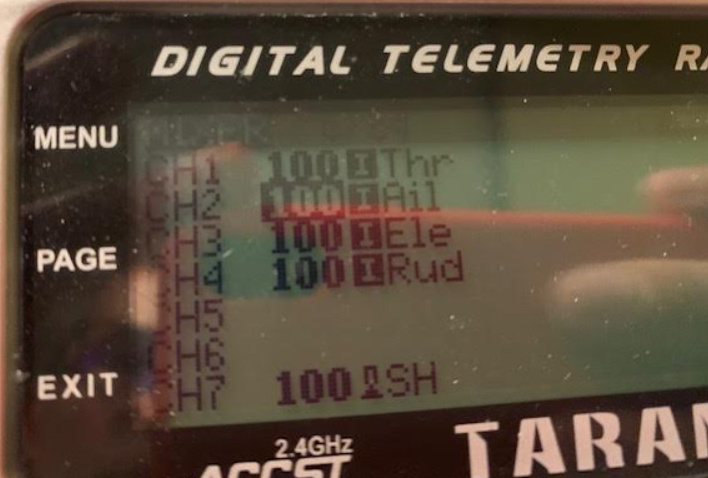
Some pics
I think the issue is with the Roboclaw ESC setup. It sounds like it’s accepting one input channel for steering and one input channel for speed. Rover works best (on skid steering vehicles) when it is given individual control of each wheel. So the Roboclaw ESC should be configured so that one input controls the speed of the left wheel, the other input controls the speed of the right wheel. … so I think this is a Roboclaw ESC configuration issue.
thank’s for your help, I reviewed the setup and seems all is ok. I don’t know how when I test the motors all the test goes good. So if the config is ko, the test motor should not work, too, no? is very very strange
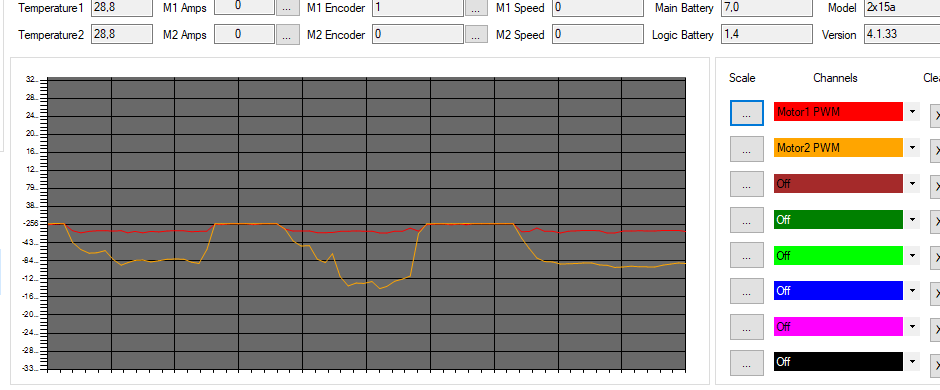
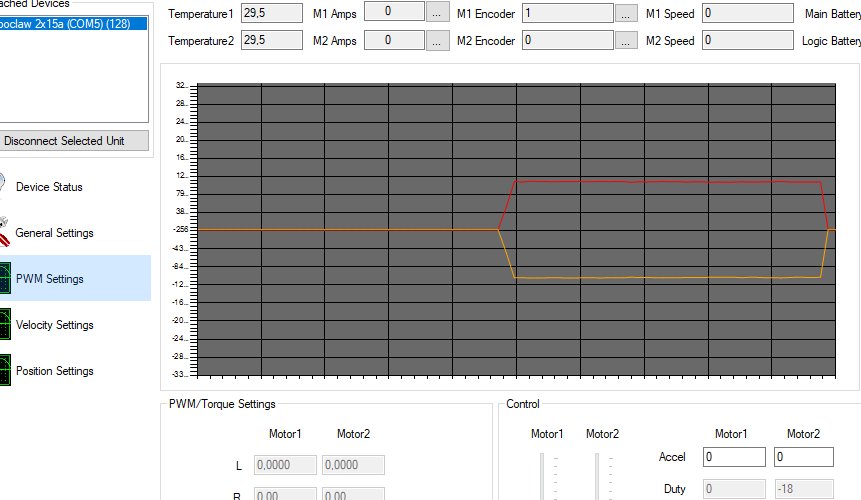
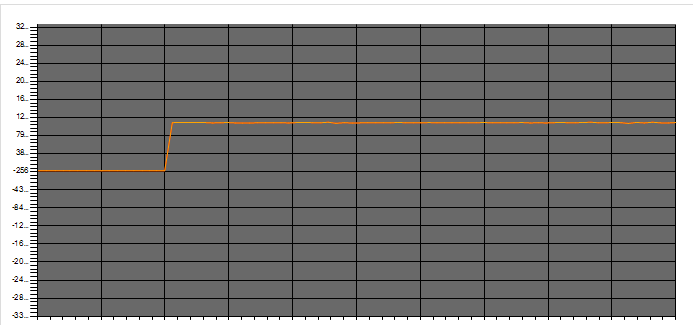
@ecabanas, if you haven’t already, I’d encourage you to download and run the roboclaw software (called BasicMicro Motion Studio, here http://downloads.basicmicro.com/software/BMStudio/setup.exe) In the roboclaw software you can do a lot including changing the operating mode and also seeing in real time the PWM signals it is receiving from the Pixhawk . Run it alongside mission planner and watch the PWM signals ardurover is sending to the ESC…