Dear users,
I encountered a problem with skewed flying while the UAV is in auto mode. It goes stright to the first waypoint and the second one, but after reaching the first waypoint it couldn’t reach the desired yaw. It flew skewed by about 90 degrees. Does anybody encountered similar problem?
I attached link to data flash log from this flight.
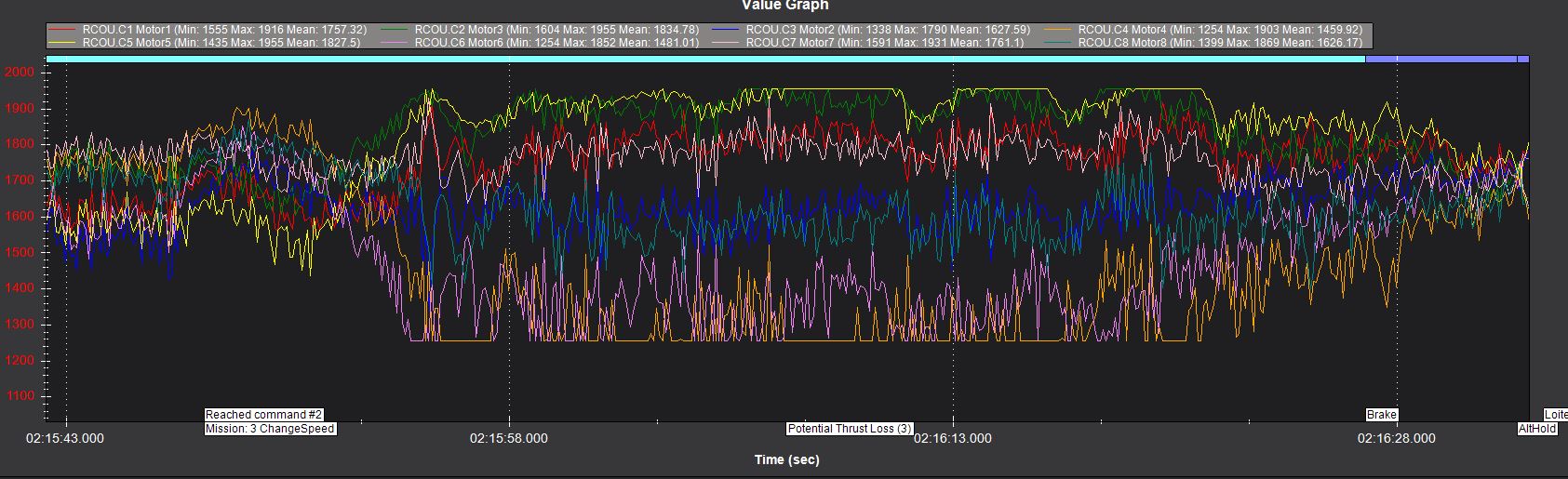
This craft probably lacked the Yaw authority to do so with some motor outputs at max so stability and authority will be lost. You don’t want to see the "Potential Thrust Loss"messages you have ever. Underpowered/overweight.