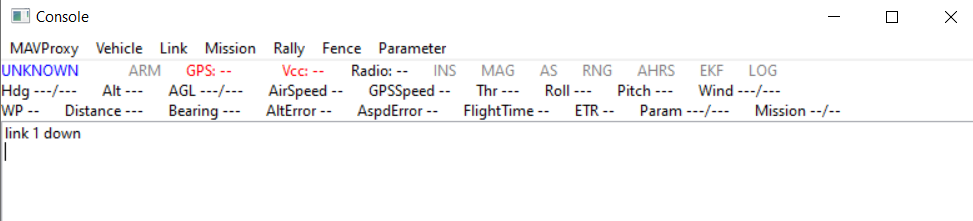
Hi all, I’m trying to simulate ArduCopter in SITL using Cygwin on a Windows 10 machine. Having followed the instructions on the ArduPilot website, when launching SITL the console shows link 1 down, and the copter fails to show on the map.
Has anyone had experience with this particular issue? I’ve searched around online, without much success. Any help would be greatly appreciated. Thanks!
Mavproxy shows the following:
Connect tcp:127.0.0.1:5760 source_system=255
Loaded module console
Loaded module map
Log Directory:
Telemetry log: mav.tlog
Waiting for heartbeat from tcp:127.0.0.1:5760
MAV>
And here is the Cygwin output:
deanm@DESKTOP-HTLP1HL ~
$ cd c:/users/deanm/Documents/unimelb/5th\ Year/Capstone/ardupilot/ArduCopter
deanm@DESKTOP-HTLP1HL /cygdrive/c/users/deanm/Documents/unimelb/5th Year/Capstone/ardupilot/ArduCopter
$ ../Tools/autotest/sim_vehicle.py --map --console
SIM_VEHICLE: Start
SIM_VEHICLE: Killing tasks
SIM_VEHICLE: Starting up at SITL location
SIM_VEHICLE: WAF build
SIM_VEHICLE: Configure waf
SIM_VEHICLE: "/cygdrive/c/users/deanm/Documents/unimelb/5th Year/Capstone/ardupilot/modules/waf/waf-light" "configure" "--board" "sitl"
Setting top to : /cygdrive/c/Users/deanm/Documents/Unimelb/5th Year/Capstone/ardupilot
Setting out to : /cygdrive/c/Users/deanm/Documents/Unimelb/5th Year/Capstone/ardupilot/build
Autoconfiguration : enabled
Setting board to : sitl
Using toolchain : native
Checking for 'g++' (C++ compiler) : /usr/bin/g++
Checking for 'gcc' (C compiler) : /usr/bin/gcc
Checking for c flags '-MMD' : yes
Checking for cxx flags '-MMD' : yes
CXX Compiler : g++ 10.2.0
Checking for need to link with librt : not necessary
Checking for feenableexcept : no
Checking for HAVE_CMATH_ISFINITE : yes
Checking for HAVE_CMATH_ISINF : yes
Checking for HAVE_CMATH_ISNAN : yes
Checking for NEED_CMATH_ISFINITE_STD_NAMESPACE : yes
Checking for NEED_CMATH_ISINF_STD_NAMESPACE : yes
Checking for NEED_CMATH_ISNAN_STD_NAMESPACE : yes
Checking for header endian.h : yes
Checking for header byteswap.h : yes
Checking for HAVE_MEMRCHR : no
Checking for program 'python' : /usr/bin/python
Checking for python version >= 2.7.0 : 3.7.10
Checking for program 'python' : /usr/bin/python
Checking for python version >= 2.7.0 : 3.7.10
Source is git repository : yes
Update submodules : yes
Checking for program 'git' : /usr/bin/git
Checking for program 'size' : /usr/bin/size
Benchmarks : disabled
Unit tests : enabled
Scripting : enabled
Scripting runtime checks : enabled
Debug build : disabled
Coverage build : disabled
Checking for program 'rsync' : /usr/bin/rsync
'configure' finished successfully (10.650s)
SIM_VEHICLE: Building
SIM_VEHICLE: "/cygdrive/c/users/deanm/Documents/unimelb/5th Year/Capstone/ardupilot/modules/waf/waf-light" "build" "--target" "bin/arducopter"
Waf: Entering directory `/cygdrive/c/Users/deanm/Documents/Unimelb/5th Year/Capstone/ardupilot/build/sitl'
Embedding file locations.txt:Tools/autotest/locations.txt
Embedding file models/Callisto.json:Tools/autotest/models/Callisto.json
Waf: Leaving directory `/cygdrive/c/Users/deanm/Documents/Unimelb/5th Year/Capstone/ardupilot/build/sitl'
BUILD SUMMARY
Build directory: /cygdrive/c/Users/deanm/Documents/Unimelb/5th Year/Capstone/ardupilot/build/sitl
Target Text Data BSS Total
---------------------------------------------
bin/arducopter 3380797 181720 416 3562933
Build commands will be stored in build/sitl/compile_commands.json
'build' finished successfully (27.750s)
SIM_VEHICLE: Using defaults from (/cygdrive/c/users/deanm/Documents/unimelb/5th Year/Capstone/ardupilot/Tools/autotest/default_params/copter.parm)
SIM_VEHICLE: Run ArduCopter
SIM_VEHICLE: "/cygdrive/c/users/deanm/Documents/unimelb/5th Year/Capstone/ardupilot/Tools/autotest/run_in_terminal_window.sh" "ArduCopter" "/cygdrive/c/users/deanm/Documents/unimelb/5th Year/Capstone/ardupilot/build/sitl/bin/arducopter" "-S" "--model" "+" "--speedup" "1" "--slave" "0" "--defaults" "/cygdrive/c/users/deanm/Documents/unimelb/5th Year/Capstone/ardupilot/Tools/autotest/default_params/copter.parm" "-I0"
SIM_VEHICLE: Run MavProxy
SIM_VEHICLE: "/usr/bin/cygstart" "-w" "mavproxy.exe" "--map" "--console" "--out" "127.0.0.1:14550" "--out" "127.0.0.1:14551" "--master" "tcp:127.0.0.1:5760" "--sitl" "127.0.0.1:5501"
RiTW: Starting ArduCopter : /cygdrive/c/users/deanm/Documents/unimelb/5th Year/Capstone/ardupilot/build/sitl/bin/arducopter -S --model + --speedup 1 --slave 0 --defaults /cygdrive/c/users/deanm/Documents/unimelb/5th Year/Capstone/ardupilot/Tools/autotest/default_params/copter.parm -I0
which: no osascript in (/usr/local/bin:/usr/bin:/cygdrive/c/Program Files (x86)/Common Files/Oracle/Java/javapath:/cygdrive/c/Program Files (x86)/Pololu/Simple Motor Controller G2/bin:/cygdrive/c/Windows/system32:/cygdrive/c/Windows:/cygdrive/c/Windows/System32/Wbem:/cygdrive/c/Windows/System32/WindowsPowerShell/v1.0:/cygdrive/c/Windows/System32/OpenSSH:/cygdrive/c/Program Files (x86)/NVIDIA Corporation/PhysX/Common:/cygdrive/c/Program Files/NVIDIA Corporation/NVIDIA NvDLISR:/cygdrive/c/Program Files/MATLAB/R2019b/bin:/cygdrive/c/ProgramData/chocolatey/bin:/cygdrive/c/Program Files/Microsoft SQL Server/120/Tools/Binn:/cygdrive/c/Program Files (x86)/MAVProxy:/cygdrive/c/Program Files (x86)/MAVProxy:/cygdrive/c/Program Files/Git/cmd:/cygdrive/c/Program Files (x86)/GNU Tools ARM Embedded/6 2017-q2-update/bin:/cygdrive/c/Users/deanm/AppData/Local/Microsoft/WindowsApps:/cygdrive/c/Users/deanm/AppData/Local/GitHubDesktop/bin:/cygdrive/c/Users/deanm/AppData/Local/Programs/Microsoft VS Code/bin)
which: no xterm in (/usr/local/bin:/usr/bin:/cygdrive/c/Program Files (x86)/Common Files/Oracle/Java/javapath:/cygdrive/c/Program Files (x86)/Pololu/Simple Motor Controller G2/bin:/cygdrive/c/Windows/system32:/cygdrive/c/Windows:/cygdrive/c/Windows/System32/Wbem:/cygdrive/c/Windows/System32/WindowsPowerShell/v1.0:/cygdrive/c/Windows/System32/OpenSSH:/cygdrive/c/Program Files (x86)/NVIDIA Corporation/PhysX/Common:/cygdrive/c/Program Files/NVIDIA Corporation/NVIDIA NvDLISR:/cygdrive/c/Program Files/MATLAB/R2019b/bin:/cygdrive/c/ProgramData/chocolatey/bin:/cygdrive/c/Program Files/Microsoft SQL Server/120/Tools/Binn:/cygdrive/c/Program Files (x86)/MAVProxy:/cygdrive/c/Program Files (x86)/MAVProxy:/cygdrive/c/Program Files/Git/cmd:/cygdrive/c/Program Files (x86)/GNU Tools ARM Embedded/6 2017-q2-update/bin:/cygdrive/c/Users/deanm/AppData/Local/Microsoft/WindowsApps:/cygdrive/c/Users/deanm/AppData/Local/GitHubDesktop/bin:/cygdrive/c/Users/deanm/AppData/Local/Programs/Microsoft VS Code/bin)
which: no konsole in (/usr/local/bin:/usr/bin:/cygdrive/c/Program Files (x86)/Common Files/Oracle/Java/javapath:/cygdrive/c/Program Files (x86)/Pololu/Simple Motor Controller G2/bin:/cygdrive/c/Windows/system32:/cygdrive/c/Windows:/cygdrive/c/Windows/System32/Wbem:/cygdrive/c/Windows/System32/WindowsPowerShell/v1.0:/cygdrive/c/Windows/System32/OpenSSH:/cygdrive/c/Program Files (x86)/NVIDIA Corporation/PhysX/Common:/cygdrive/c/Program Files/NVIDIA Corporation/NVIDIA NvDLISR:/cygdrive/c/Program Files/MATLAB/R2019b/bin:/cygdrive/c/ProgramData/chocolatey/bin:/cygdrive/c/Program Files/Microsoft SQL Server/120/Tools/Binn:/cygdrive/c/Program Files (x86)/MAVProxy:/cygdrive/c/Program Files (x86)/MAVProxy:/cygdrive/c/Program Files/Git/cmd:/cygdrive/c/Program Files (x86)/GNU Tools ARM Embedded/6 2017-q2-update/bin:/cygdrive/c/Users/deanm/AppData/Local/Microsoft/WindowsApps:/cygdrive/c/Users/deanm/AppData/Local/GitHubDesktop/bin:/cygdrive/c/Users/deanm/AppData/Local/Programs/Microsoft VS Code/bin)
which: no gnome-terminal in (/usr/local/bin:/usr/bin:/cygdrive/c/Program Files (x86)/Common Files/Oracle/Java/javapath:/cygdrive/c/Program Files (x86)/Pololu/Simple Motor Controller G2/bin:/cygdrive/c/Windows/system32:/cygdrive/c/Windows:/cygdrive/c/Windows/System32/Wbem:/cygdrive/c/Windows/System32/WindowsPowerShell/v1.0:/cygdrive/c/Windows/System32/OpenSSH:/cygdrive/c/Program Files (x86)/NVIDIA Corporation/PhysX/Common:/cygdrive/c/Program Files/NVIDIA Corporation/NVIDIA NvDLISR:/cygdrive/c/Program Files/MATLAB/R2019b/bin:/cygdrive/c/ProgramData/chocolatey/bin:/cygdrive/c/Program Files/Microsoft SQL Server/120/Tools/Binn:/cygdrive/c/Program Files (x86)/MAVProxy:/cygdrive/c/Program Files (x86)/MAVProxy:/cygdrive/c/Program Files/Git/cmd:/cygdrive/c/Program Files (x86)/GNU Tools ARM Embedded/6 2017-q2-update/bin:/cygdrive/c/Users/deanm/AppData/Local/Microsoft/WindowsApps:/cygdrive/c/Users/deanm/AppData/Local/GitHubDesktop/bin:/cygdrive/c/Users/deanm/AppData/Local/Programs/Microsoft VS Code/bin)
RiTW: Window access not found, logging to /tmp/ArduCopter.log