Hi all,
this is my first post, and I’m just starting to learn about Ardupilot and Mission Planner, and drones in general. Hopefully I’m posting to the right forum/topic.
I’m trying to run Ardupilot with SITL on one Ubuntu PC, and connect to it from Mission Planner on another PC. I am able to get everything working (connect between the PCs and run a mission) over a WiFi connection (TCP/IP), but now I want to connect over a generic serial connection. On the PC running Ardupilot SITL I have my serial coming in from /dev/ttyUSB1 (115200, 8 databits, 1 stopbit, no parity) and on my PC running Mission Planner, I have created a virtual serial port at /dev/pts/2. I tested the serial connection between the PCs just using “cat /dev/pts2” and “echo “hi” > /dev/ttyUSB1” and vice versa, and everything works fine.
However, I’m not sure how to get Mission Planner to connect to ardupilot over UART. I have tried running
sim_vehicle.py -A “uartC=uart:/dev/ttyUSB1,115200” --no-mavproxy
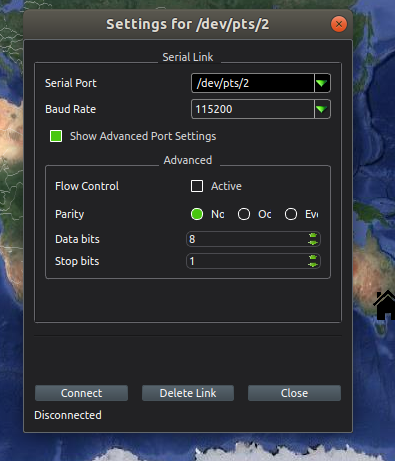
and then in Mission Planner, I changed the communication serial port to /dev/pts/2. However, I’m not able to get any connection. It isn’t clear in the Mission Planner GUI the correct syntax for the serial port naming (for example should it be pts/2 or /dev/pts/2). Also with sim_vehicle, I’m not sure how to set the serial port configuration with number of data/stop bits etc. I’m also not sure whether I’m using the correct syntax when I call sim_vehicle, or whether what I’m trying to do is even achievable. Any hints would be more than welcome.
thanks,
Aaron