I have a strange problem setting up a coaxcopter. When armed, the motors don’t respond to throttle input(but they do receive an idle signal), the flaps are not stablizing, only responding to pitch/roll commands. I connected the two flap servos to output 1-2 and two motors to output 5-6; the ArduCopter version is 3.5.7; Pixhawk version 2.4.8; performed all calibrations.
I would really appreciate if anyone knows what the problem is:pray:
I have. In fact, the ESCs didn’t receive signal(they did the “waiting for signal” beep) until I armed it with the button. Is there any other arming procedure I wasn’t aware of?
So the arming button needs to be pressed.
Then you need to arm the aircraft with the right rudder command.
You should be in stabilise.
Increase the throttle very slowly to full throttle.
So if you do that in that order and nothing happens then have a look on your telemetry and make sure the channel outputs that the esc’s are plugged in are increasing.
Make sure your ESC’s have been calibrated.
If that doesn’t work then turn on logging when disarmed and repeat the process and show me a log.
A problem occurred after several months of normal flight:
After arming, the outputs on the servo channels(1-4) slowly increase/decrease to either 1100 or 1900. They are also extremely sensitive to yaw input and get stuck at 1100 or 1900. Radio inputs are all reading normal. I’ve tried re-installing the firmware and re-calibrating accelerometer and compass. What may be the problem?
I built the coaxial copter. Motors is working but servos not moving.
And while I moved roll and pitch stick, motor RPM is varying.
Hardware set up:
I am using pixhawk 1.
servo 1 and 2 are plugged in output 1 and 2.
motor 1 and 2 are plugged in output 5 and 6.
Parameter setup : using latest firmware.
servo output1: RC1
servo output2: RC2
servo output3: not use
servo output4: not use
servo output5: motor1
servo output6: motor 2
I spent the whole day to figure it this but failed.
I’ve built a coaxcopter too and it’s seems that i have the same issue as AeroGen.
So, i used the 3.6.5 firmware on PixRacer (ChibiOS for BLHeli32), wired as in the wiki (Servo1:Front Flap,Servo2: right Flap. Servo5:Upper Mot Servo6:lower Mot).
Frame Class 9, Type 0 (“Plus”)
When i armed, motors spins, seems to well react to yaw rc inpout, but to pitch and roll RC input too and when i tilt the frame it’s seems that motors react to pitch and roll angle too. As their are mot 5 and 6 of a hexacopter…???
Servo don’t move to.i’ve tried several servo#_function, RCPassTrought servo move on RC Input but don’t stabilize (seems to be logic…), Aileron and Elevator functions no reaction(RC Input and/or frame orientations).
I can’t find Forward Flap and Right Flap Servo Function, what i missed?
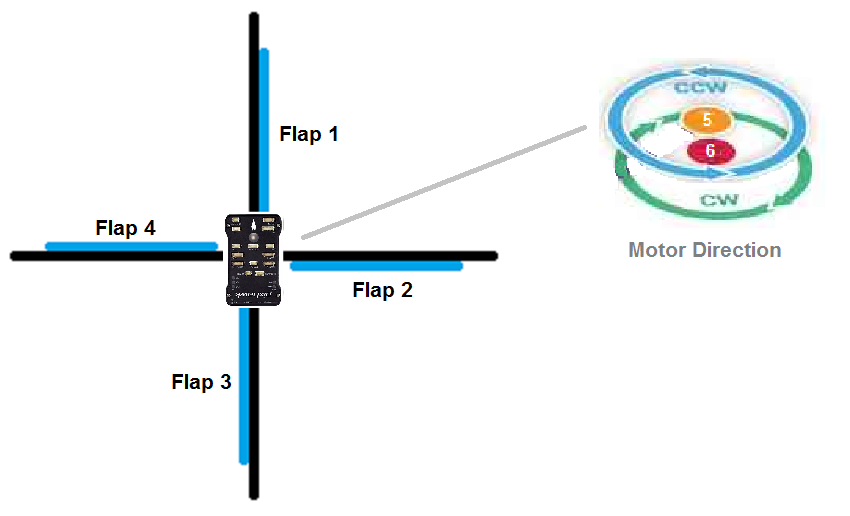
correct motor output is:
actuator -> output function
flap servo 1 - > motor 1
flap servo 2 - > motor 2
flap servo 3 -> motor 3
flap servo 4 -> motor 4
motor ccw -> motor 5
motor cw - > motor 6
as per image from the wiki
ps motor throttling up when you tilt could be angle boost, you can disable it with a parameter
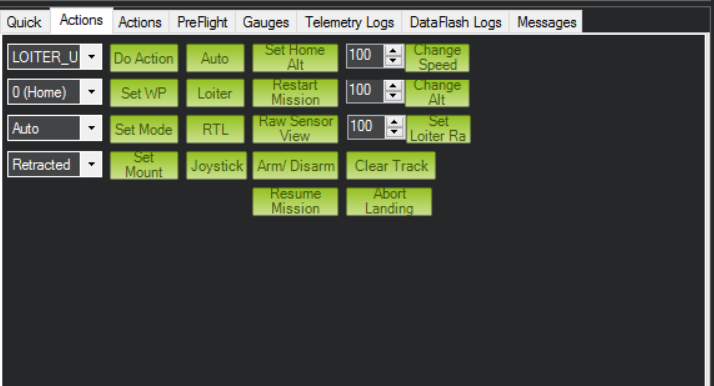
By entering the input roll command with the radio control as seen in the mission planner software, the corresponding output roll signal does not change or is not clearly changed as seen in the oscilloscope and the output of the vehicle’s flap in practice which the input command is not executed well by the flaps.
But when the device is not in ARM mode and board is yellow blinking, the output signal changes in the scope and in the device that is well visible and clearly.
The same is true in flight modes of Althold, Stablize, Acro, and Poshold. We also increase or decrease the control gains and tested it in various Throttle . In the higher Throttle , the output signal changes more clearly but still not so good. What other settings can be made to make better output signals and better Attitude control of roll and pitch in Arm mode of copter?
You will have to arm and have some throttle to get the flaps moving i would guess. Defiantly take your props off to test this.
Yellow blinking usually means its not happy about something. if your connected on mission planner and all your arming check are enabled it will tell you what the error is when you try and arm.
Hi Dear Leonardhall
I accomplish your advices and other work but that problem (No roll and pitch motion with radio input command) is still there.
Should not the our vehicle center of mass be under the motor for better stability and control roll and pitch? because when base or support of vehicle(i.e the motor) become under of vehicle center of mass It works like a reverse pendulum (In the configuration of our device, the center of gravity seems to be about top of motor.)
Is there other procedure for order pitch and roll command from Mission Planner to single copter?!
 and it’s seems that i have the same issue as AeroGen.
and it’s seems that i have the same issue as AeroGen.