Hi,
I’m assuming that since you’re trying mutli-vehicle simulation, then it’s all working properly with a single drone.
Yes, the script was written for Linux, but I think it should work for Cygwin as well, but can’t say for sure since I haven’t tested it on that. Unfortunately, I won’t be able to do so for some days atleast since recently did a fresh installation and will need to install everything again and also have exams right now.
Yes, this IP address (239.255.145.50:14550) seems very strange, on digging around a bit found this but still have no idea why
Anyways, you could try specifying the IP directly, maybe something like mcast:127.0.0.1:14500, hopefully the format is correct but might need some modification
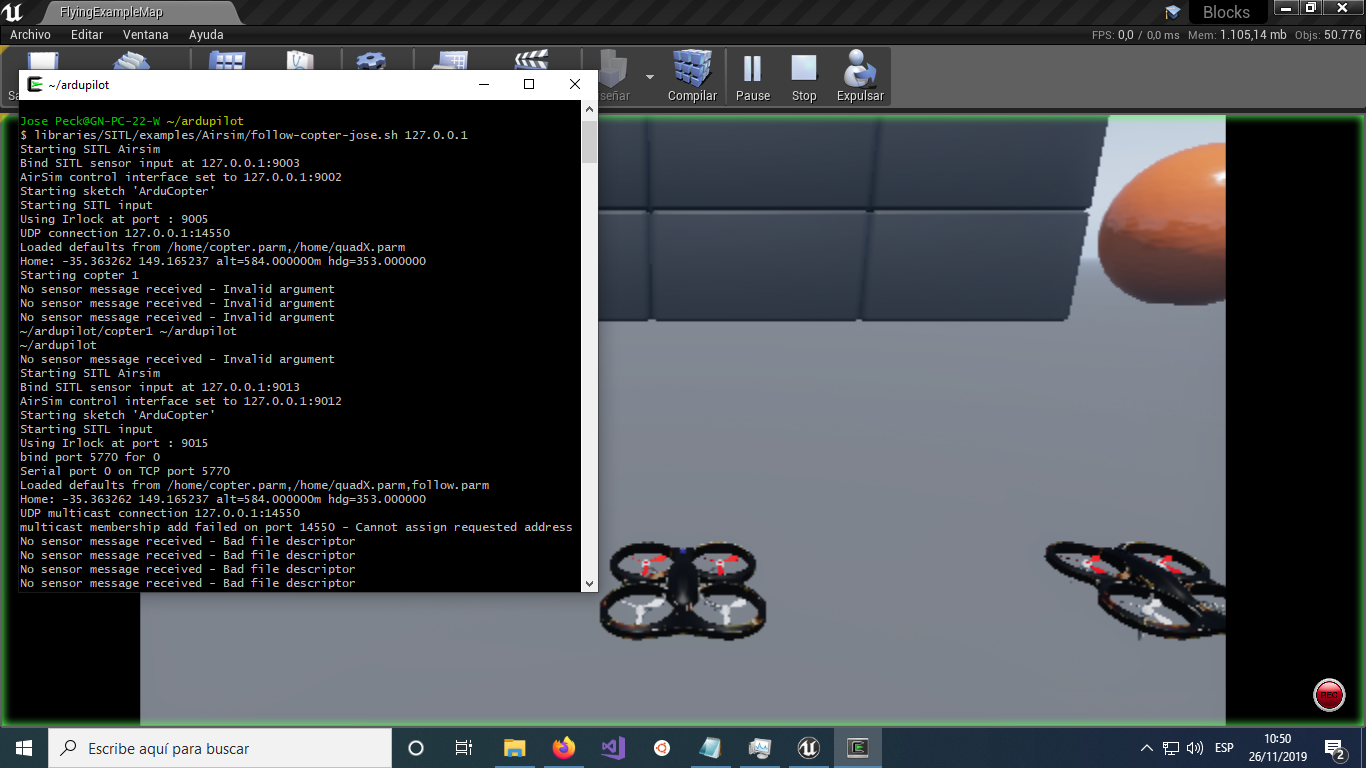
I specified the mcast:127.0.0.1:14550 but still getting the multicast error. However, the first time i ran it, i got the two drones in Airsim visualized (image below) but Unreal was stuck. I’m getting a continuous output “No sensor message received - Bad file descriptor” (i looked in sim_vehicle.py and couldn’t find this error). Do you really think that the Windows User folder whitespace could be the problem? @rajat2004
This is my console output right now (not the one with the two stuck drones, that one was similar but after a moment, the “No sensor data” error stopped and the two drones popped up)
Starting SITL Airsim
Bind SITL sensor input at 127.0.0.1:9003
AirSim control interface set to 127.0.0.1:9002
Starting sketch ‘ArduCopter’
Starting SITL input
Using Irlock at port : 9005
UDP connection 127.0.0.1:14550
Loaded defaults from /home/copter.parm,/home/quadX.parm
Home: -35.363262 149.165237 alt=584.000000m hdg=353.000000
Starting copter 1
No sensor message received - Invalid argument
~/ardupilot/copter1 ~/ardupilot
~/ardupilot
Starting SITL Airsim
Bind SITL sensor input at 127.0.0.1:9013
AirSim control interface set to 127.0.0.1:9012
Starting sketch ‘ArduCopter’
Starting SITL input
Using Irlock at port : 9015
bind port 5897 for 0
Serial port 0 on TCP port 5770
Loaded defaults from /home/copter.parm,/home/quadX.parm,follow.parm
Home: -35.363262 149.165237 alt=584.000000m hdg=353.000000
UDP multicast connection 127.0.0.1:14550
multicast membership add failed on port 14550 - Cannot assign requested address
No sensor message received - Bad file descriptor
No sensor message received - Bad file descriptor
No sensor message received - Bad file descriptor
No sensor message received - Bad file descriptor
No sensor message received - Bad file descriptor
@josepeck Well, certainly the whitespace isn’t the issue, or the binaries themselves wouldn’t have been located and executed
The “No sensor message received” message is being generated from the AirSim backend in ArduPilot
The Bad File descriptor is due to the socket not being initialized properly, and the Unreal Engine is stuck since it’s waiting for messages from Ardupilot. I’ll try to test it as soon as possible on Windows, if possible, could you try using WSL once and see if the problem is occurring there also, if yes then atleast we’ll know it’s mostly related to Cygwin.
From the new output you’ve posted above, it’s trying to bind the multicast socket to 127.0.0.1:14550, so the command-line value does work, try and see if changing the port makes any difference
All of my testing on Windows was with Ardupilot running inside WSL, I don’t exactly remember if I had tested multi-vehicle simulation also but hopefully I did
Anyways, I’ll try to check this and will post if there’s any progress
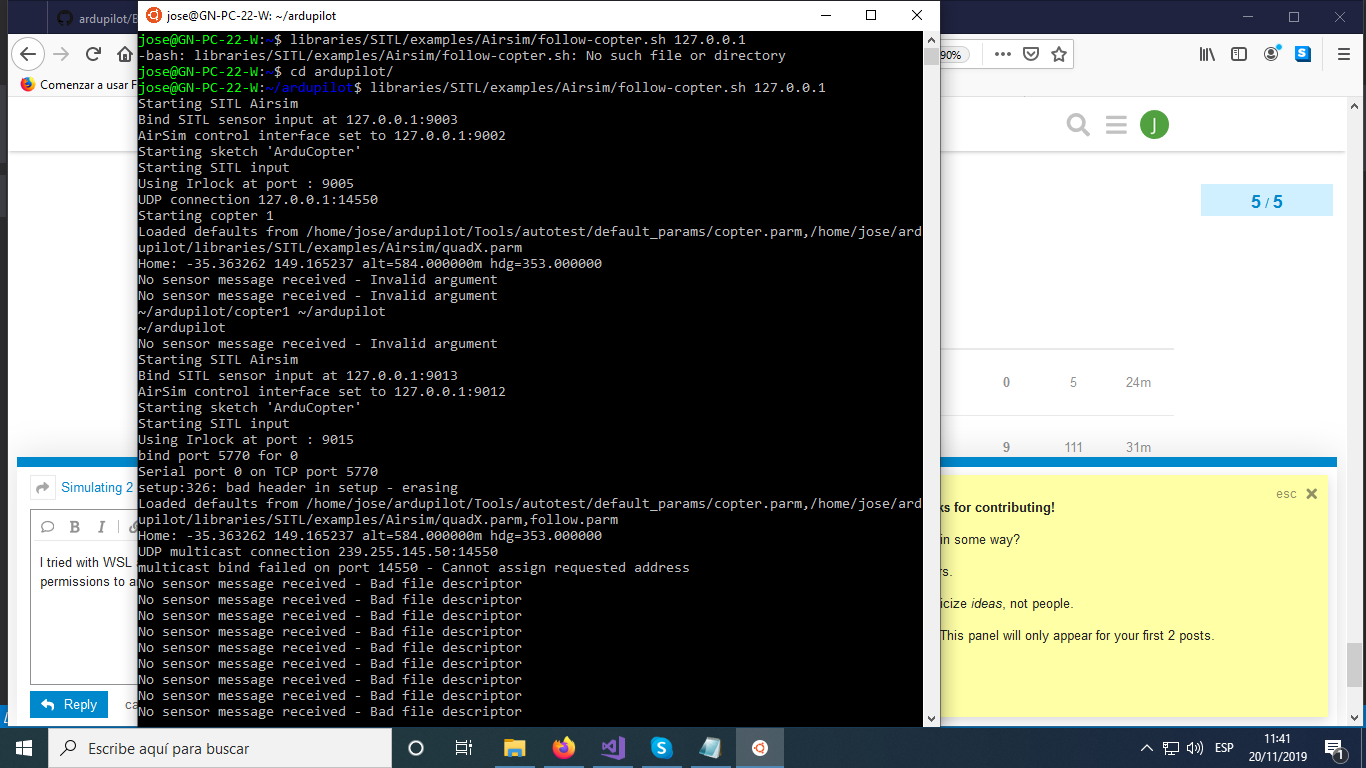
@rajat2004 I tried with WSL and this time i got a Windows Firewall prompt (maybe there is the issue). I gave permissions to ardupilot and then got the same error (but this tim, the original follow-copter.sh didn’t gave me the multicast error).
@josepeck I’ve got it working finally! Got the same problems as yours, figuring it out was a long and screwed up journey from WSL issues to networking pages, but it’s working now!!
There were a lot of problems on the net with WSL networking and such, as to what is supported and all, but then from the commits above you can see how small the changes actually were, it’s funny and sad as well.
The main thing whch put me on the right track - https://github.com/rust-lang/rust/pull/21267
So it seems like multicast on Windows works on 127.0.0.1, others are blocked by firewall. Though my testing was with the Firewall disabled, so might need to do that.
Please test the changes on your system and see if it works, in WSL as well as Cygwin. I didn’t use Cygwin, but maybe might work.
Thanks for reporting the issue and hopefully works on your system as well!
Interesting, I just started to experiment on AirSim … and I like it … Thanks
I loaded WSL and experience the same issue on address:
Starting SITL Airsim
Bind SITL sensor input at 127.0.0.1:9013
AirSim control interface set to 127.0.0.1:9012
Starting sketch ‘ArduCopter’
Starting SITL input
Using Irlock at port : 9015
bind port 5770 for 0
Serial port 0 on TCP port 5770
Loaded defaults from /home/alien/ardupilot/Tools/autotest/default_params/copter.parm,/home/alien/ardupilot/libraries/SITL/examples/Airsim/quadX.parm,follow.parm
Home: -35.363262 149.165237 alt=584.000000m hdg=353.000000
UDP multicast connection 239.255.145.50:14550
UDP multicast connection 239.255.145.50:14550
multicast bind failed on port 14550 - Cannot assign requested address
multicast bind failed on port 14550 - Cannot assign requested address
Where do you change this adress to 127.0.0.1 ? connection 239.255.145.50:14550
Glad to know that you like it, I was thinking of starting off with some Vision & Lidar based experiments with it after my exams end, any ideas or suggestions would be great
@ppoirier Great! Did you have to change some things in the follow_copter.sh script?
Since you’re using TCP, I think you would have modified this line to remove the udpclient and add tcp here (Also, now I can see that the udpclient problem would have been happening here, the $GCS_IP might have been empty)
Also, is the mcast enabled? I’m not sure since both the vehicles are in Guided mode rather than the second one being in Follow mode where it’ll be needed
Thank you @rajat2004!!, I got the two copters now flying finally (through connecting them one by one in MissionPlanner). Now i’m trying to attach mavproxy as the doc webpage suggests but I get an ‘X display’ error and the console nor the map are showing. Do you know what this might be @ppoirier?
I actually found mavproxy.py in the.local directory but not in /ardupilot as the documentation suggests.
@josepeck Ahh, bad luck, maybe it was too much to hope that it would work on Cygwin as well.
Could you do a short test and see if binding on 0.0.0.0 works? (mcast:0.0.0.0:14500), both with and without the fix, and see if that makes any difference?
Just a thought which I had, I don’t have Cygwin setup right now, will take some time to get that up and running.
Thank you! I got it now. Still I haven’t been able to get the second drone to follow the first one.Did you managed? I don’t get a connection with mavproxy when running mavproxy.py --master=tcp:127.0.0.1:14550 --source-system 1 --console --map like in the docuementation.
I used these ports - that are the standard tcp ports for SITL.
But I cannot get the multicast UDP started , I suspect there is some kind of problem wit this multicast script… but I did not looked at it yet
@rajat2004 I tried your new script and it’s working fine in WSL even with 3 drones. But when i try to run mavproxy with the port 14550 i get this error. It seems that the only ports that i can get a heartbeat from the two drones are 5763 and 5770 like @ppoirier did.
@josepeck Thanks for testing! The MAVProxy problem is with WSL and Cygwin both or with Cygwin only?
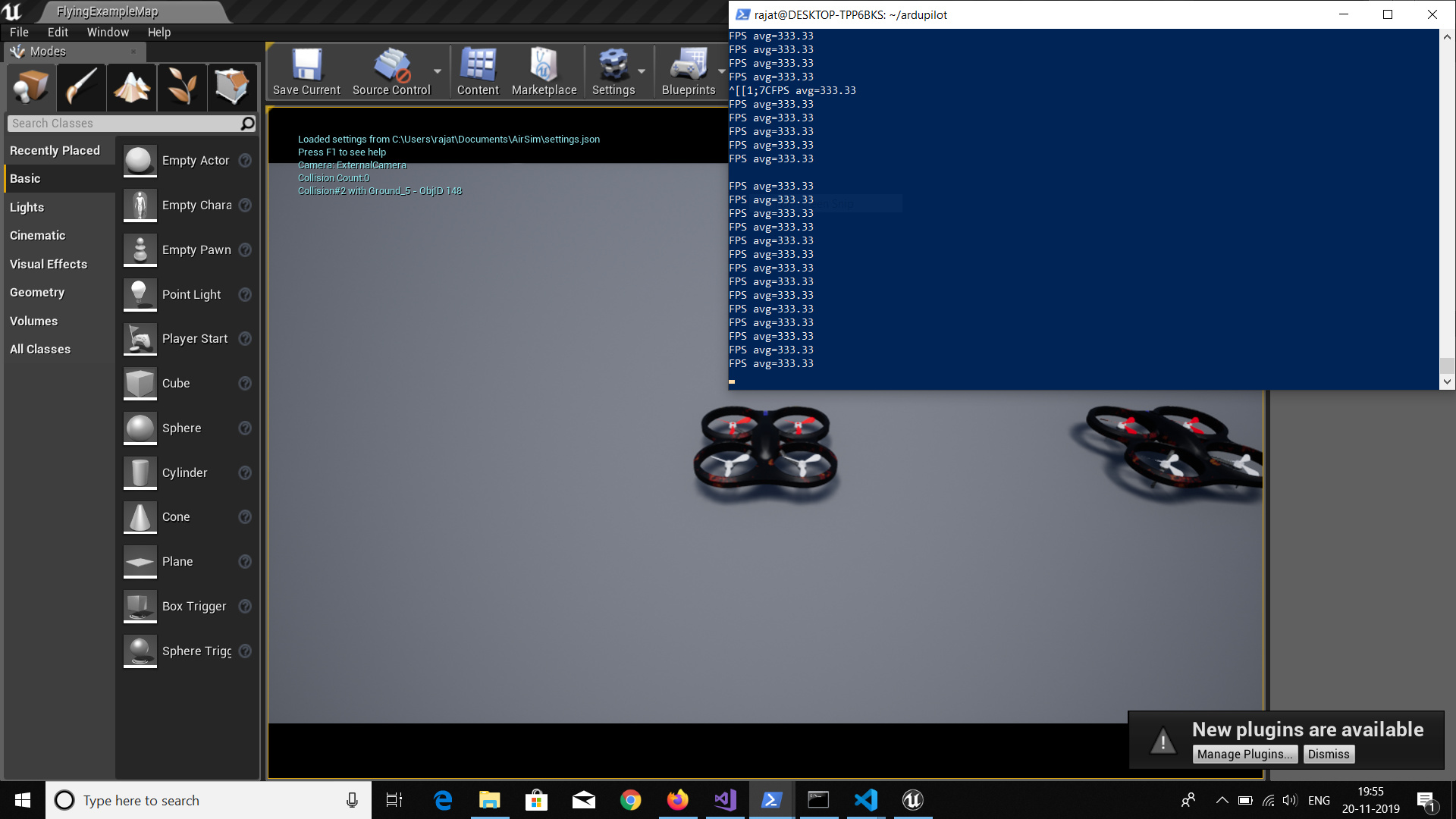
Also, from the picture, it seems that the Use Less CPU option is enabled in Unreal Engine.
Not sure if that’s intentionally, but if not then do the following: Go to Edit->Editor Preferences, in the Search box type CPU and ensure that the Use Less CPU when in Background is unchecked.
This will keep the graphics and everything same when switching between windows.
@rajat2004 I switched to WSL, testing in Cygwin for me is a pain because of the whitespace in my Windows Users folder name (no easy task to remove). In order to test in Cygwin i need to modify follow-copter every time and change the ROOTDIR variable.
I reduced the graphics because the computer i’m working on is really slow and so far I don’t need the visuals.




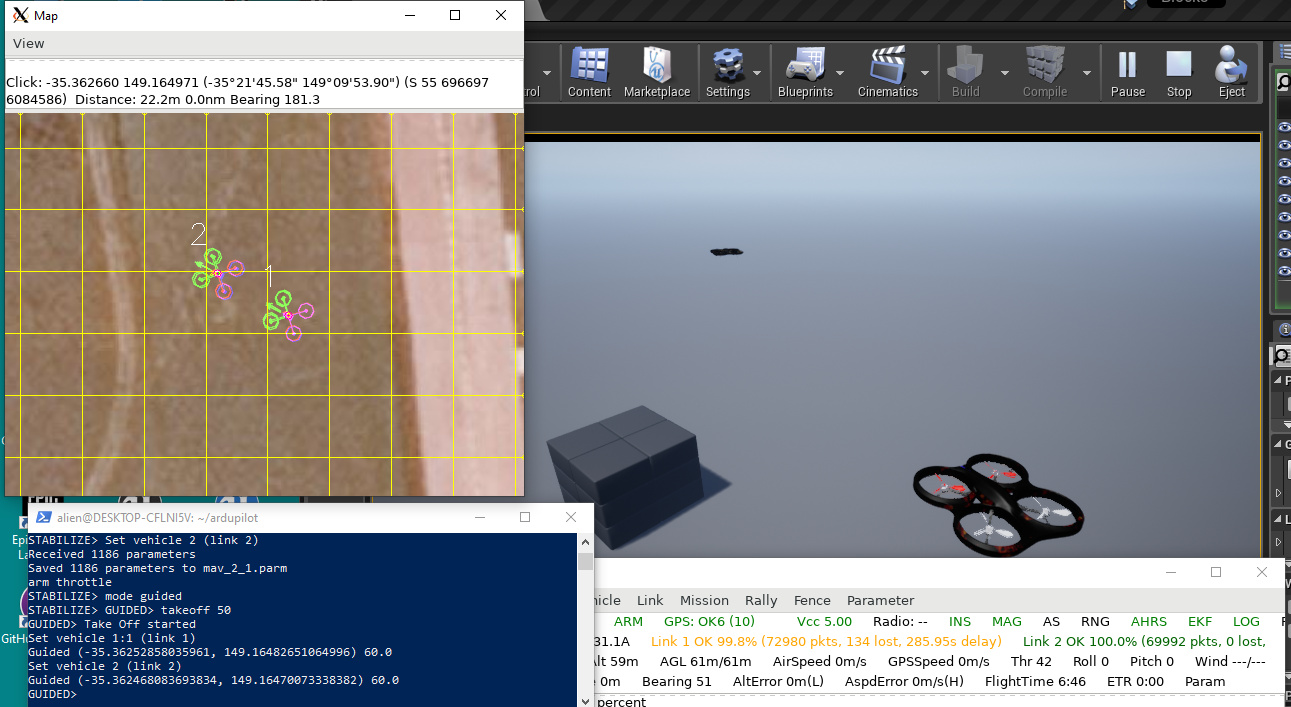
 (through connecting them one by one in MissionPlanner). Now i’m trying to attach mavproxy as the doc webpage suggests but I get an ‘X display’ error and the console nor the map are showing. Do you know what this might be
(through connecting them one by one in MissionPlanner). Now i’m trying to attach mavproxy as the doc webpage suggests but I get an ‘X display’ error and the console nor the map are showing. Do you know what this might be