First flight attempts 5" HexaCopter using H743-mini. I try to take off and experienced severe wobbling and oscillation, immediately and before aircraft lifts off the ground.
I also noticed that all the commands in all the axes are reversed (roll, pitch and yaw). The FC is positioned correctly and I did an accelerometer calibration on the three axes.
I’ve start with: PID Controller Initial Setup:
INS_ACCEL_FILTER : 15Hz
INS_GYRO_FILTER : 80Hz (for 5 inch props)
ATC_ACCEL_P_MAX : 162000 (for 5 inch props)
ATC_ACCEL_R_MAX : 162000 (for 5 inch props)
ATC_ACCEL_Y_MAX : 27000 (for 5 inch props)
ACRO_YAW_P: 0.5 x ATC_ACCEL_Y_MAX / 4500 (0.5X54000/4500=6. I was not sure, so I left it at 4.5)
ATC_RAT_PIT_P, ATC_RAT_PIT_I, ATC_RAT_RLL_P, ATC_RAT_RLL_I = 0.135 (end at 0.04)
ATC_RAT_PIT_D, ATC_RAT_RLL_D = 0.0036 (end at 0.001)
I started at 0.0036 and 0.135 respectively and reduced each attempt by 50%. I finished at 0.001 and 0.04 respectively (lowest values). As I went down in values the oscillation aggression went down, but even at the lowest values I could not leave the ground.
I would put INS_ACCEL_FILTER back up to 20
and use this spreadsheet for setting those initial params, in this case you are missing the MOT_BAT ones. Ensure the voltage monitoring is working correctly, and current monitoring if you can.
The Rate PIDs should work reasonably around 0.08 for P and I, and 0.004 for D terms.
And try increasing
ATC_ANG_PIT_P,4.5
ATC_ANG_RLL_P,4.5
to as much as 8 or 10 and see what effect it has.
But next step is more testing and supplying a .bin log file instead of just params.
Thanks for the response, I really appreciate the help.
Now is the middle of the night, I will check the changes you will recommend tomorrow.
The voltage and current values on the DATA screen look fine, I will check this again.
Do you have any idea why all the stick commands on all axes are reversed (roll, pitch and yaw) or how can I fix it?
Attached BIN file.
Thanks for the help, I will report tomorrow after checking and changing the recommended parameters.
Itzik 2021-05-13 18-13-58.bin (553.0 KB)
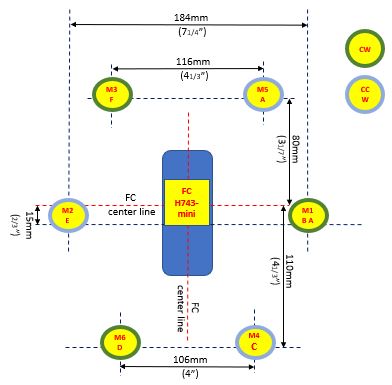
The motors are not symmetrically arranged on a circle around the center of the FC as in the “classic” HexaCopter, they are a bit arranged like H. Attaches a picture.
I did not notice that AHRS_ORIENTATION is set to “6”. The FC is installed normally. I changed the value to “0”.
After changing the AHRS_ORIENTATION I was able to take off and hover without the wobble.
Both axes ROLL and YAW are fine, the PITCH is reversed. It is not clear to me why and how to fix it.
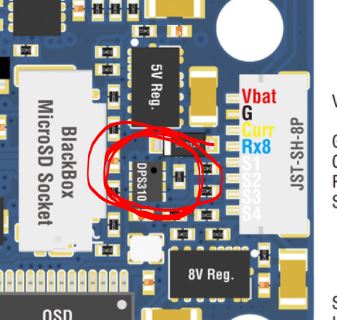
I will protect the barometer with a foam, is it on the side of the SD card?
I started with the PID that came up by default:
ATC_RAT_PIT_P, ATC_RAT_PIT_I, ATC_RAT_RLL_P, ATC_RAT_RLL_I = 0.136
ATC_RAT_PIT_D, ATC_RAT_RLL_D = 0.0036
Do you recommend to start with different values?
Attaches a BIN file from the short hover.
Thanks again for all the help,
Itzik 2021-05-17 02-22-23.bin (624 KB)
These are not default so wondering where they came from? That along with the AHRS Orientation is suspiciously like this has been monkeyed with before.
ATC_ANG_PIT_P,10
ATC_ANG_RLL_P,10
Reverse the pitch channel in your transmitter, This is commonly required.
Make an attempt at it and come back with questions.
And-You have a Dshot protocol set but ESC telemetry is not configured. Motor RPM from telemetry is the way to go for the notch filter, so configure it. Actually Bidirectional Dshot is an even better option which runs on these FC’s if you install the right firmware and configure it.
Do you mean that 10 is too high? I started at 4.5 but in the first response above, suggested going up to at least 8-10 … Do you suggest going back to 4.5?
That’s what I did. I reversed the pitch channel in my transmitter, but I thought it was not the right way … to fix the problem.
I will try to fix the things you recommended tomorrow and come back with an update.
Thank you,
Itzik
No way to know with where you are with this craft. Perhaps it’s to low… Auto Tune will sort that, if you get everything else set. I would put it back to default.
Reversing in the Transmitter is the right way. But perhaps it’s confused with the wrong AHRS orientation parameter?
Thanks Dave,
Can you please explain (or send a link to WIKI) about ESC telemetry? I use BS13A 6in1ESC and it has no communication port, at least not one I found. Or did you mean something else?
Nevermind then, tha appears to be a BLHeli_S ESC. Telemetry is available on BLHeli_32 ESC’s.
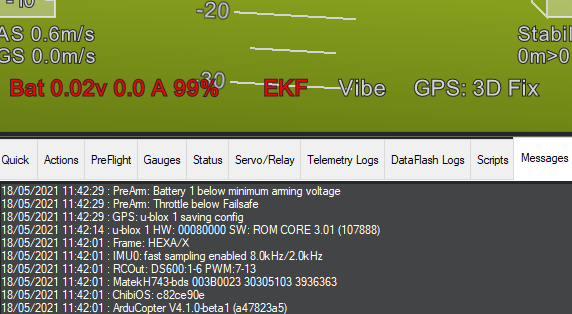
Out of curiosity, after you connect to Misison Planner and on the Messages Screen what does the Banner Message say for RCoutput protocol? As an example here it shows: RCOut: DS600:1-4 PWM:5-6
OK, so Dshot is good. I see you have the Bidirectional version of firmware installed. No problem with that but to use BDshot with a BLHeli_S ESC requires custom firmware installed on the ESC. I have a craft flying that way. I’m not sure if there is a custom version for the ESC you have.
I did not find another version. I also do not have the ESC’s Pinout for connecting telemetry, it’s a pretty closed FlyWoo product.
Today was a good day!: I flew in AltHold. I flew at MOT_HOVER_LEARN = 2, do I need to return to “0” after this flight?
I also checked Loiter and RTL. Despite the strong wind, everything worked fine.
Tomorrow morning, I have no wind. I will check the Dynamic Notch Filter and then AutoTune.
Thanks for the support, I really appreciate it.
Itzik
Another question: I use CROSSFIRE to enjoy telemetry. I installed YAPPO but do not get the data on the radio. Do you have a direction to check? The MTEK website says (Crossfire support only exists in “latest” 4.1, not stable 4.0.x, if you load “latest” then Set SERIAL7_PROTOCOL = 23, RSSI_TYPE = 3) and that’s what I did.