I’ve been tuning a few vehicles lately with autotune and have used various amounts of aggressiveness between .05 and .1. The best results on all three aircraft seem to be around the .075 mark. The three vehicles are a 680mm quad, the second a 600mm Octo Quad X and the third a 1200mm Octo X. On all three I have noted some roll oscillation when a strong yaw and forward input are given to the aircraft. The worst offender by far is the Octo X. On the Octo X only - and I suspect this is all tuning related - however I am still in the learning phase here - so be gentle - the Octo X gets up some serious roll oscillation on a fast descent in pos hold. The oscillations start small and continue to about 30 plus degrees left and 30 plus degrees right. The copter is controllable however it is not safe to land as the oscillations are too steep for a safe landing. If I switch from pos hold to stabilize the copter re-stabilises. It flies pretty well (although not perfectly) the rest of the time.
The problem appears to start when the descent rate is about that normally seen in an RTL. If I halve the descent rate the oscillations do not occur. The steeper the descent rate the worse the oscillations on the Octo X.
I suspect if I can get some help with the Octo X issue it may lead me in the direction of fixing the smaller problem with the forward / yaw roll oscillation.
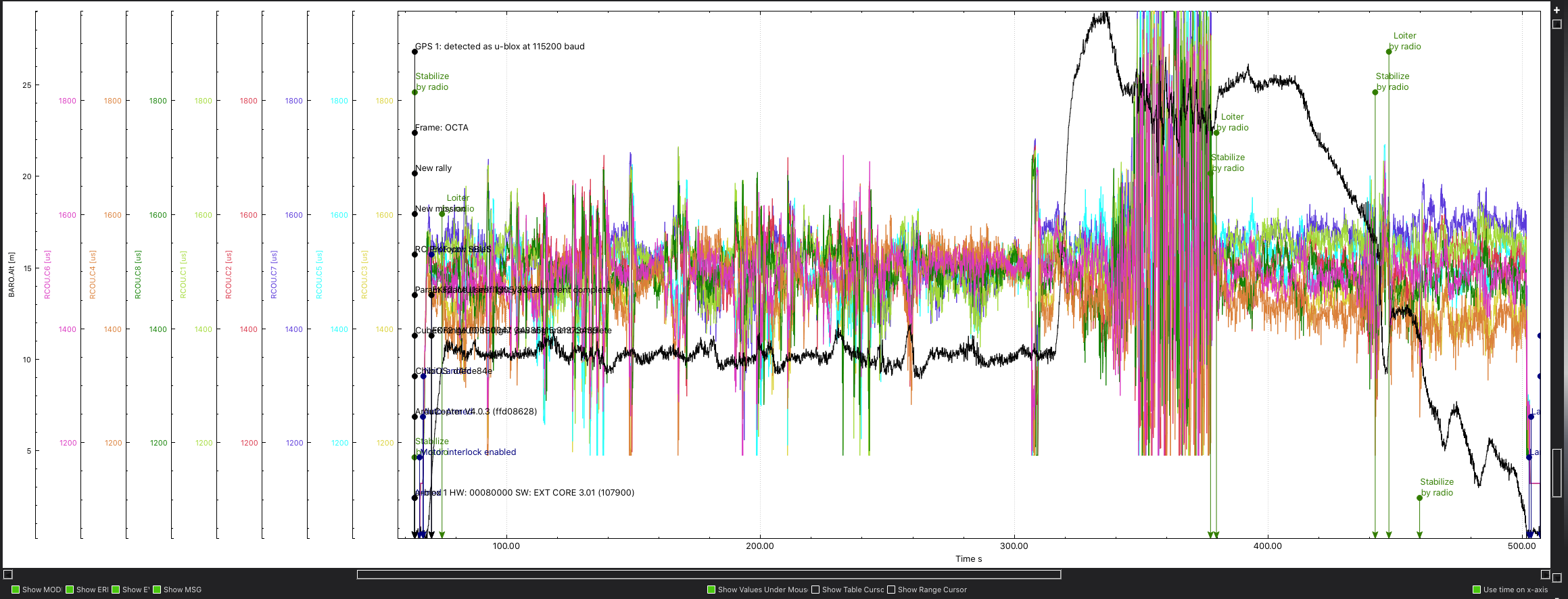
The current really jumps up from 20 amps to about 100 amps when those oscillations start. X axis vibrations are a little high, maybe check prop balance and flight controller mounting, secure anything loose, change anything that’s transferring vibrations to the FC.
What size props are on the Octo X? Then I can give you some more paramaters to change.
I highly recommend doing the Compass/Motor calibration - read the instructions, it can be very dangerous if done wrong.
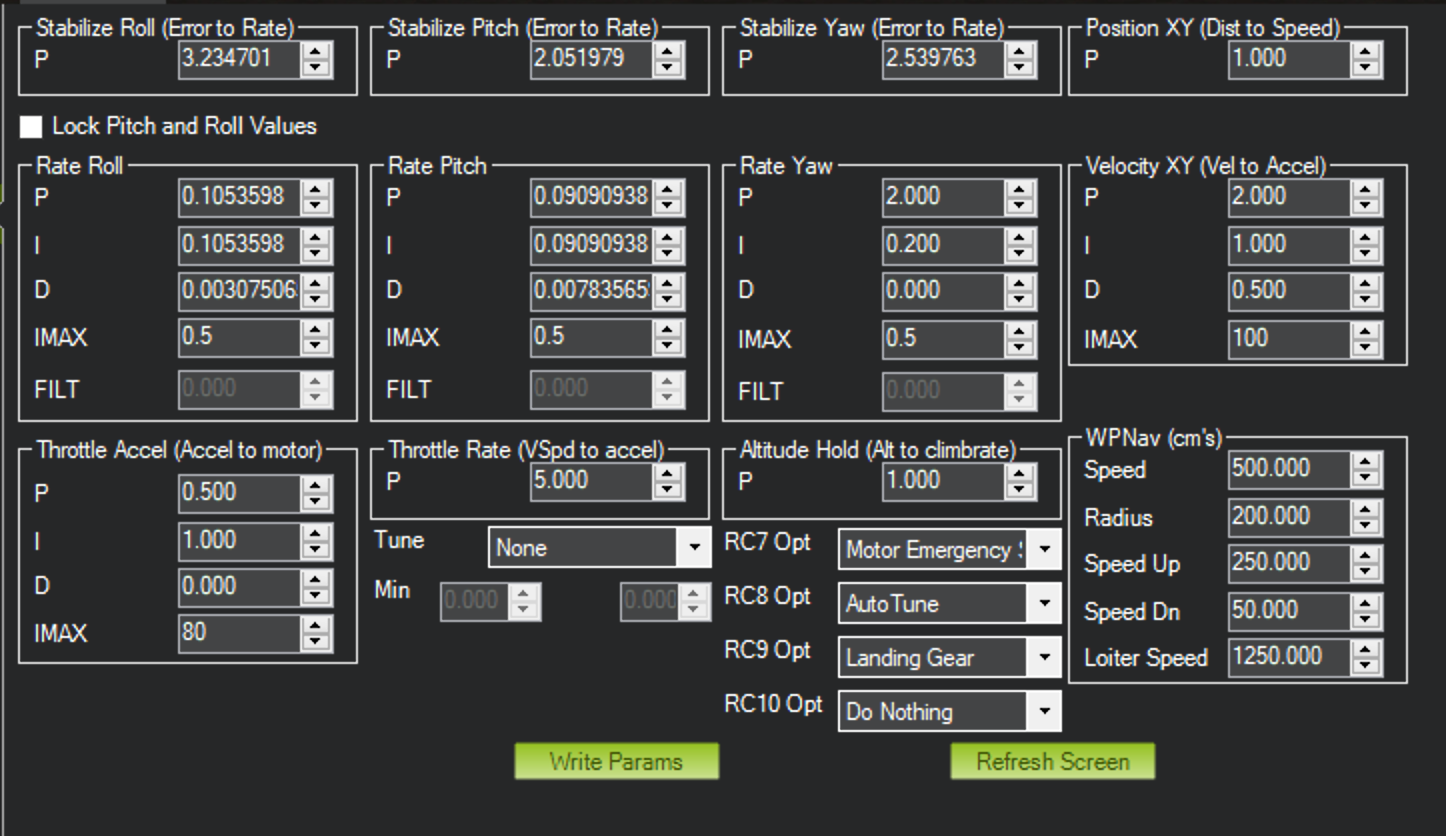
Start by changing these parameters for now:
ATC_INPUT_TC,0.2 (RC Feel)
BATT_ARM_VOLT,22.10
BATT_CRT_VOLT,21.00
BATT_LOW_VOLT,21.60
MOT_BAT_VOLT_MAX,25.20
MOT_BAT_VOLT_MIN,19.80
PSC_ACCZ_I,0.5
PSC_ACCZ_P,0.25
…then we can set more for the prop size, the Compass/Motor calbration and then Autotune.
I’m not surprised the current jumps up. In the descent - i.e. when the throttle has been lowered in pos hold the oscillation is more prevalent the higher the descent rate. As the oscillations become larger - 30 plus degrees to each side on the X axis the power used to correct / recorrect in an infinite loop increases dramatically as does the velocity of the oscillation.
The vibration graphs seem to be within tolerance. The FC is an Orange Cube which has internal vibration dampening, sitting atop so firm foam tape which is then on a typical neoprene isolated FC mount.
The frame is a Tarot T18 1200mm frame with Tarot 5008 motors and 18x5.5 carbon fiber props.
Currently the BAT_CRT_VOLT and BATT_LOW_VOLT are 20.16 and 20.79 volts. I have bw set the MOT_BAT_VOLT_MIN and MAX parameters and the PSC_ACCZ_I parameter however at this stage I’ve left PSC_ACCZ_P at .5 as it complains about being out of range at .25.
Weather permitting I’m up for another autotune tomorrow. The bits that confuses me is the problem comes in when using less power rather than more - i.e. only in descent.
I have performed the compass motor calibration a number of times. I have done it two ways - one with throttle from 0% to 100% and another with throttle from 0% to 60% - which is where the copter tends to operate.
Here’s the output from a calibration I just performed.
You can still set this, the “out of range” is just a warning that can be ignored in this case.
Definitely set these too:
ACRO_YAW_P,2.22
ATC_ACCEL_P_MAX,61000.00
ATC_ACCEL_R_MAX,61000.00
ATC_ACCEL_Y_MAX,20000.00
ATC_RAT_PIT_FILT,13.00
ATC_RAT_RLL_FILT,13.00
ATC_RAT_YAW_FILT,2.00
INS_ACCEL_FILTER,20.00 (can try as low as 10)
INS_GYRO_FILTER,26.00
MOT_THST_EXPO,0.73
And make sure the Compass/Motor calibration was saved.
You should see non-zero values in these:
COMPASS_MOT_X
COMPASS_MOT_Y
COMPASS_MOT_Z
There’s a set of them for each compass.
And I’d highly recommend using these settings, your batteries will have trouble recovering from lower voltages and will have a shorter life.
BATT_ARM_VOLT,22.10
BATT_CRT_VOLT,21.00
BATT_LOW_VOLT,21.60
Hi Mike, I had, but not applied everything. I’ve gone back and applied all settings correctly - and noted some of the roll parameters were way off. It’s windy today so I plan to redo the autotune when the wind comes down a bit. Thanks for your help! Cheers, David.
Update - I took all of the advice into account and made the suggested changes. On power up the copter had a yaw oscillation that smoothed out with power increase. I reset the PIDS t default, re-auto tuned and achieved a reasonably stable tune. I tried an aggresiveness of.05 which worked pretty well with a single oscillation on a hard break from any direction using full stick in loiter. I then moved to .075 which produced around 6 oscillations on the same maneuvers. I reverted to the .05 tune and all seems pretty good. On a very fast descent in loiter I get some oscillation initiated by course correction when settling with power but that’s about it. It’s fine in stabilise or altitude hold. I think the only remaining issue is how aggressive loiter is in its corrections. Once I’ve had a chance to review the log file I’ll post it. Thanks to all for your help. Cheers David.
 - the Octo X gets up some serious roll oscillation on a fast descent in pos hold. The oscillations start small and continue to about 30 plus degrees left and 30 plus degrees right. The copter is controllable however it is not safe to land as the oscillations are too steep for a safe landing. If I switch from pos hold to stabilize the copter re-stabilises. It flies pretty well (although not perfectly) the rest of the time.
- the Octo X gets up some serious roll oscillation on a fast descent in pos hold. The oscillations start small and continue to about 30 plus degrees left and 30 plus degrees right. The copter is controllable however it is not safe to land as the oscillations are too steep for a safe landing. If I switch from pos hold to stabilize the copter re-stabilises. It flies pretty well (although not perfectly) the rest of the time.