Hello,
I am using a pixhawk orange cube on a vtol frame using the plane 4.0 firmaware and Qenable set to 1. I tried to take off in Q Loiter mode and the rpm increases slightly above the arming rpm but not nearly enough to take off. With the same props, motors and escs I have flown this aircraft using DJI NAZA M V2 and it flew perfectly fine in quad mode, so not sure what is wrong.
In order to troubleshoot I removed the propellers and tested the following:
- QLoiter mode - ESCs connected to pixhawk and motors
- QStabilize mode - ESCs connected to pixhawk and motors
- QLoiter mode - ESCs disconnected from pixhawk
- QStabilize mode - ESCs disconnected from pixhawk
Bin files from the flight and the above tests are here
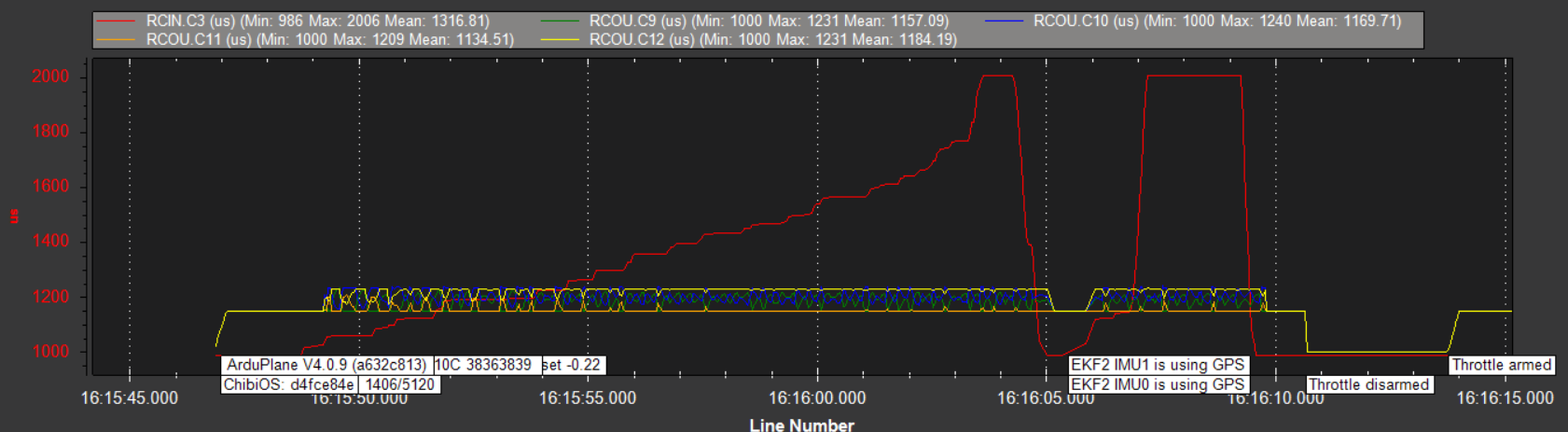
In QLoiter mode even if the pwm value of rc in increases to 1900 the rcout values of the 4 motors (10,11,12,13) stay under 1200.
In Qstabilize mode the RC out pwm values rise up proportionally with the rc in values but the values for motors 12 and 14 are consistently lower than for motors 11 and 13 as if the plane wants to pitch nose down.
I suppose the RC out on all 4 motors should match RC in and then I can expect a safe flight.
Any insight or help in resolving this is much appreciated.
Thanks,
Sanyam