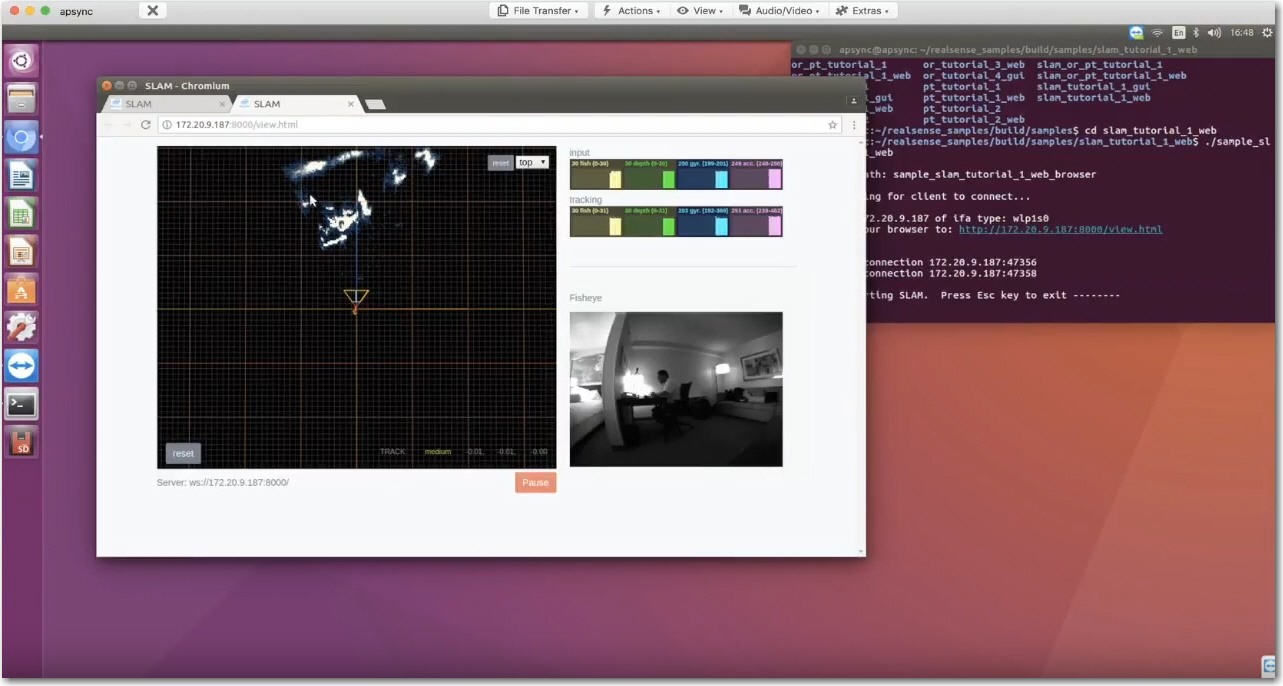
In which Jaime Machuca and team forges ahead, SLAM* is operational on the Intel Joule, the rover gets remotely tuned from Australia, and a brutal, late spring Colorado snowstorm fails to stop the project!
*See also: Ardupilot Vision Projects Gitter Channel.