odd, glad that its working, Yeah AHRS_TYPE 10 is SITL. I guess flash your parameters back and see if one of them causes the issue.
All parameters simply played back again - and roll and pitch induced power control of the motors are correct ! Unfortunately it is raining at the moment. Hover test maybe not until next weekend.
Thanks for your patience and help Peter.
The Roll/Nick test in QStabilize with running propellers (with a second person holding the aircraft near the CG) was also successful. Now we hope to have good weather at the weekend.

1 Like
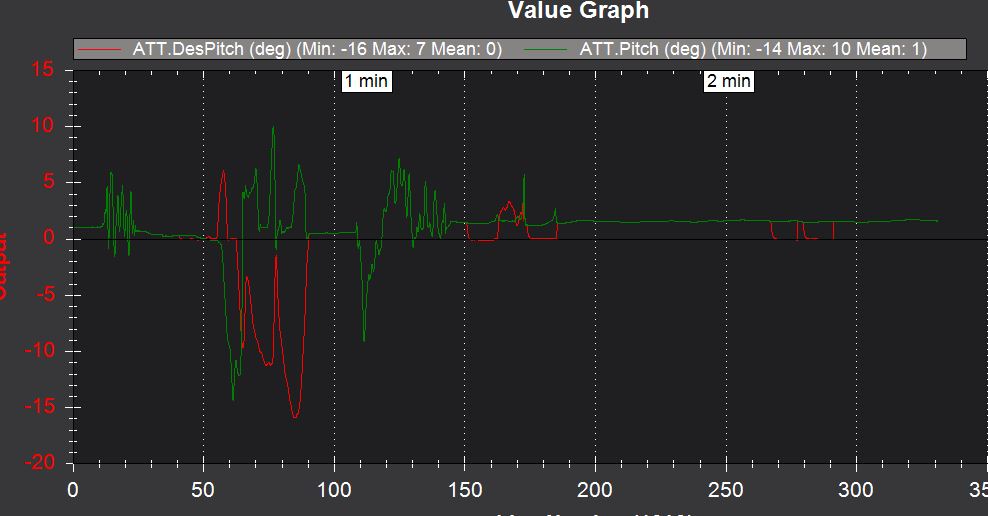
To our despair, pitch doesn’t work.
If you do not pay attention, the plane rolls over immediately.
Roll axis corrects correctly, pitch again in opposite directions:
Logfile and parameter: https://www.magentacloud.de/share/c4-k8nm-76
Rolf
but you had it working before? any parameter changes? I have no ideas
I thought it worked, because just on the missionplanners tuning window it looked like pitch would work correctly. That was now the first real start attempt (without parameter change).
Hello Rolf, Peter, I am also interested to build very efficient tricopter Vtol. How is it going?? Can you make it fly well?? Any update about the hover test? How about transition to Fbwa mode? Regards.
Hi Tony,
the plane is ready for maiden flight. But unfortunately, we still have not found out the error, why Peters STITL simulation works fine and uploaded to the pixhwak pitch control is faulty.
Rolf
Sorry if I am wrong, is the error only the Pitch control?? I can not open the vimeo video, so I don’t understand if you can do hover in stabilize mode?? Is the pitch control error occured in the coding or on the parameter??
I have got my hands on a tricopter, I will try this out for real and see If I can get to the bottom of whats going on.
Hello Rolf, Peter any update on this experiment?? I also want to try…
Hi Tony,
i hope to have time next week to systematically tackle the causes of this failure again.
Hello Rolf, good to hear from you. I hope Tridge will help. Good luck…
Hey guys, is there any update on this progress? I’m interested in building a similar rig setup. On mine however, I want to add a seperate lift motor at the CG which rotates for forward flight and keep the forward motor (rudder) fixed.
I have changed back to the normal firmware and set negative P for pitch. That does not produce a somersault. Yaw I still have to adjust correctly, because vectored yaw unfortunately does not work. A tilt mechanism must also be repaired.
Thanks Rolf. How did you adjust for yaw?
Anyone else try this configuration?
Today the first short hover flights with unchanged firmware were successful. Everything with standard parameters, except of course the Q_A_RAT_PIT Parameters with negative P:
Q_A_RAT_PIT_D,0
Q_A_RAT_PIT_FF,0
Q_A_RAT_PIT_FILT,10
Q_A_RAT_PIT_I,0
Q_A_RAT_PIT_IMAX,0.5
Q_A_RAT_PIT_P,-0.2
Next will be hovering with mounted wings.
Today we have successfully “hovered” the first tests with mounted wings. Because of the relatively strong wind for TRI-VTOLS we have not hovered higher.
Rolf
1 Like
Today we tried the first forwardtransition. Unfortunately, the nose rears up during tranistion.We have to find out the cause for it yet.
1 Like
Also our second transition attempt failed. Walter and I suspect that the rear engines are fighting against the single front engine. After all, QHover works fine.
Rolf