Hello all,
When reviewing logs after last few flights, I noticed that the integral parts of PIDs are reset to zero when mode of flight changes.
Is this done on purpose and if so, then why?
Logs are too big to attach, but here are screenshots:
Hello all,
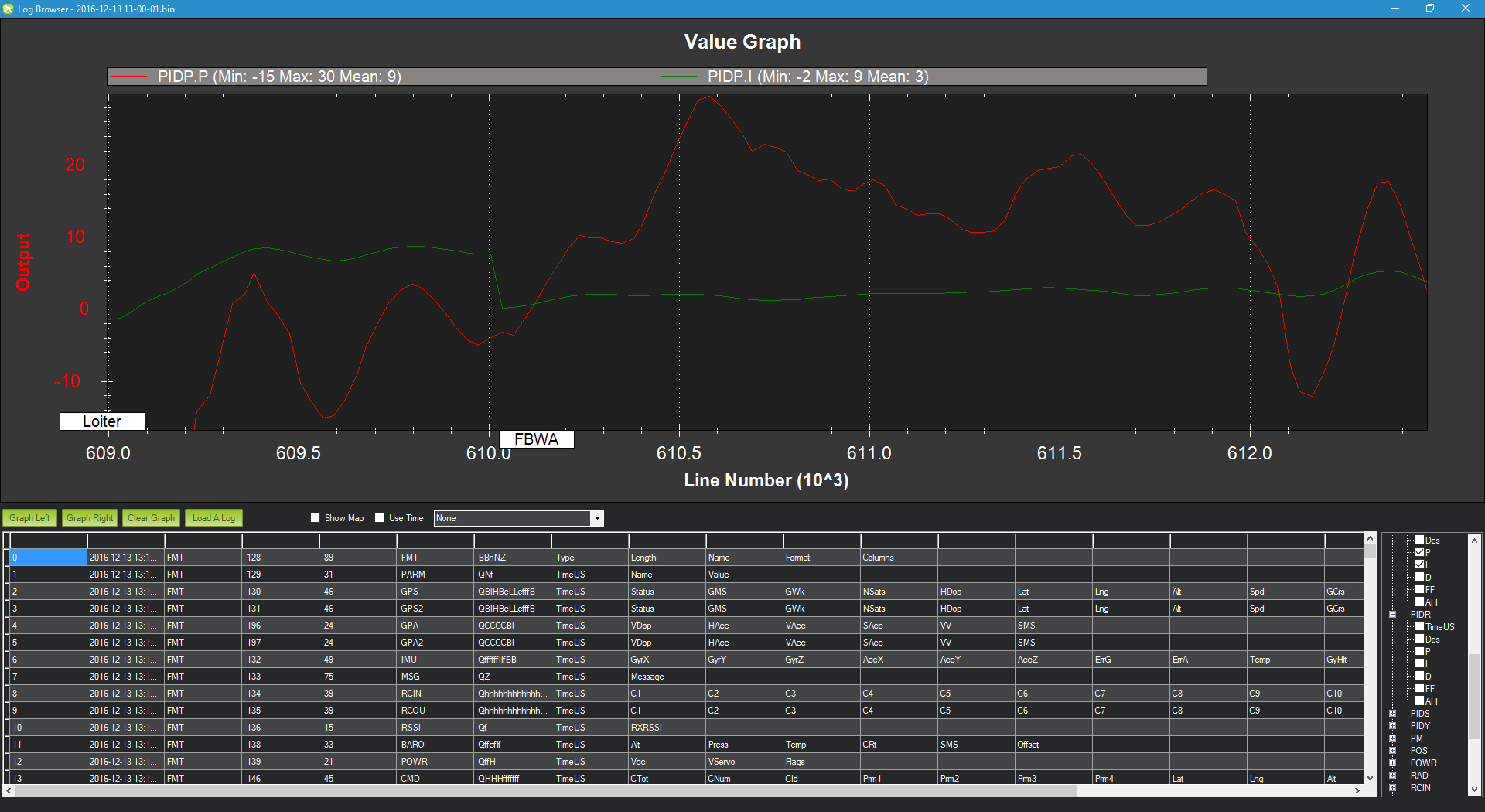
When reviewing logs after last few flights, I noticed that the integral parts of PIDs are reset to zero when mode of flight changes.
Is this done on purpose and if so, then why?
Logs are too big to attach, but here are screenshots:
you’re right, that is a hangover from much older code. I’ve fixed it in master
Thanks!
Note that I’ve left in the zero of the steering integrator for ground wheel control, as I think that is in fact useful
Great! Thank you, though I wanted to change the code myself to make contribution