I have a ch-47 tandem heli that was setup to run on a Bavarian Demon HC3SX using only four servos. I can not figure out which frame type and swash type to use in arducopter. Using type 11 dual heli does not give me correct movement of the swash due to not having the other 2 servos. Using standard heli with an H4-45 swash type will give me correct swash movement but does not have yaw control. I am very new to arducopter so i apologize if this has been asked before and appreciate all the help i can get. Is there a way to move the tail yaw functions into the swash on the h4-45?
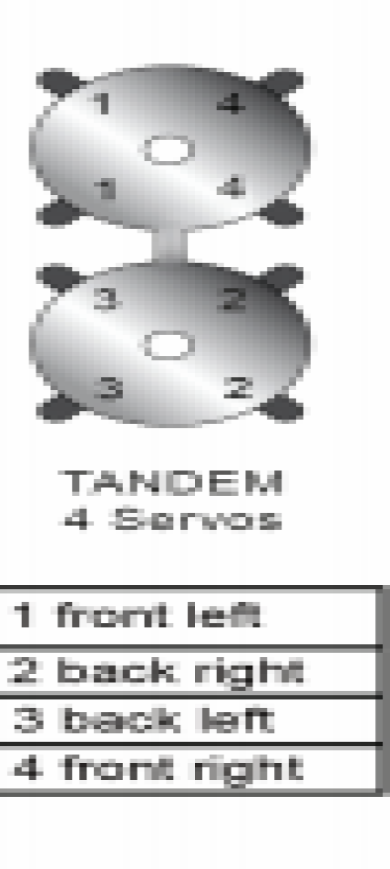
Sounds like a very cool heli! So you have two servos on each swashplate? They are at the 0 and 90 deg positions? Pictures would be great. Not only to understand the setup but to also see your heli.
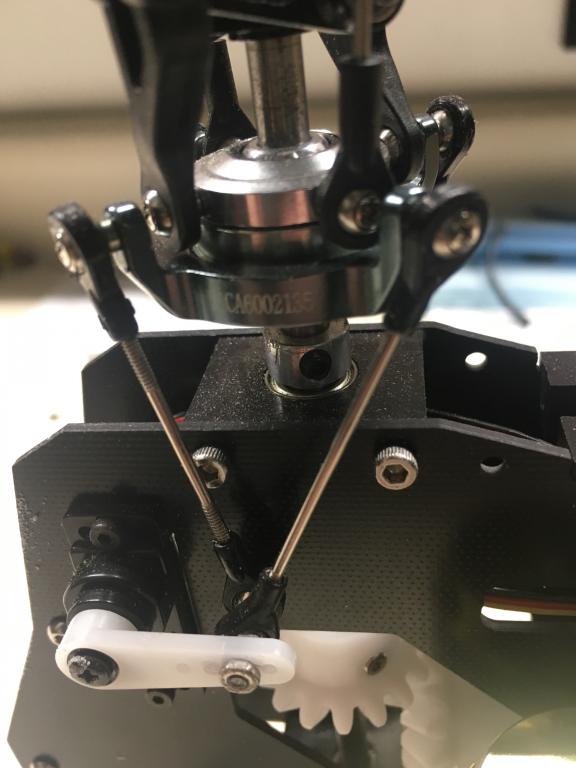
Here are some pictures to help.
the heli uses an h4 swash with two rods to each servo in a v configuration like this.
if I set frame type to 6 and swash type to h4-45 I can get the correct swash movements needed but have no way to incorporate yaw commands as I have no tail.
setting the frame type to 11 gives me yaw incorporated into cyclic but would require me rebuilding the heli to run six servos. I would think there would be a simple software change or something to get this to work but i do not know enough about arducopter to even know where to begin.
Use H4-90 swashplate type. You servos would only be connected to the 90 and 270 deg positions on the swashplate. This would enable the dual-heli frame (frame 11) to control your heli. For this type helicopter the yaw is controlled using differential lateral cyclic. The setup I suggest above should work.
OK I think I understand, Keeping the v rod four servo setup I have now I would set frame type to 11, swash plate to h4-90. Then connect the servos like this:
heli side > Arducopter
servo 1 > motor 2
servo 2 > motor 7
servo 3 > motor 5
servo 4 > motor 6
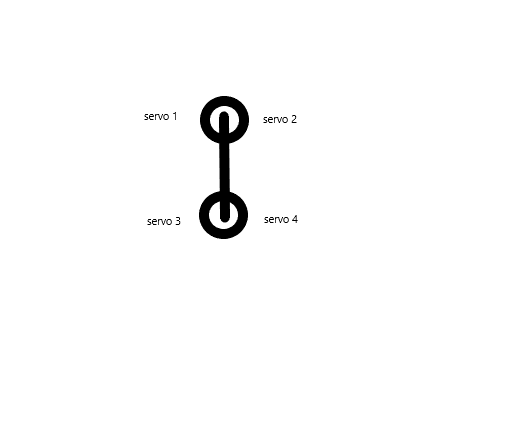
Per your diagram above you show servos 1 and 4 connected to the forward swash and servos 2 and 3 to the aft. So it would look like this. AC Setup Servo and AC setup function refer to the Column heading of the heli setup page in QGC or mission planner
fwd swash
diagram > FC pin/AC setup Servo > AC setup function
servo 1 > Servo 1 > motor 1
servo 4 > Servo 2 > motor 2
aft swash
diagram > FC pin/AC setup Servo > AC setup function
servo 3 > Servo 4 > motor 4
servo 2 > Servo 5 > motor 5
Set everything up as you explained. Swash movement is working fine and I have what seems to be correct output to all four servos. However I am getting an error message " Motors: unable to setup motor 2" I have looked over everything I know to look at and don’t see why. Googling did not help either 
Please post a screen shot of your heli setup page in mission planner or QGC. Or you could post your param file. I want to look at your setup.
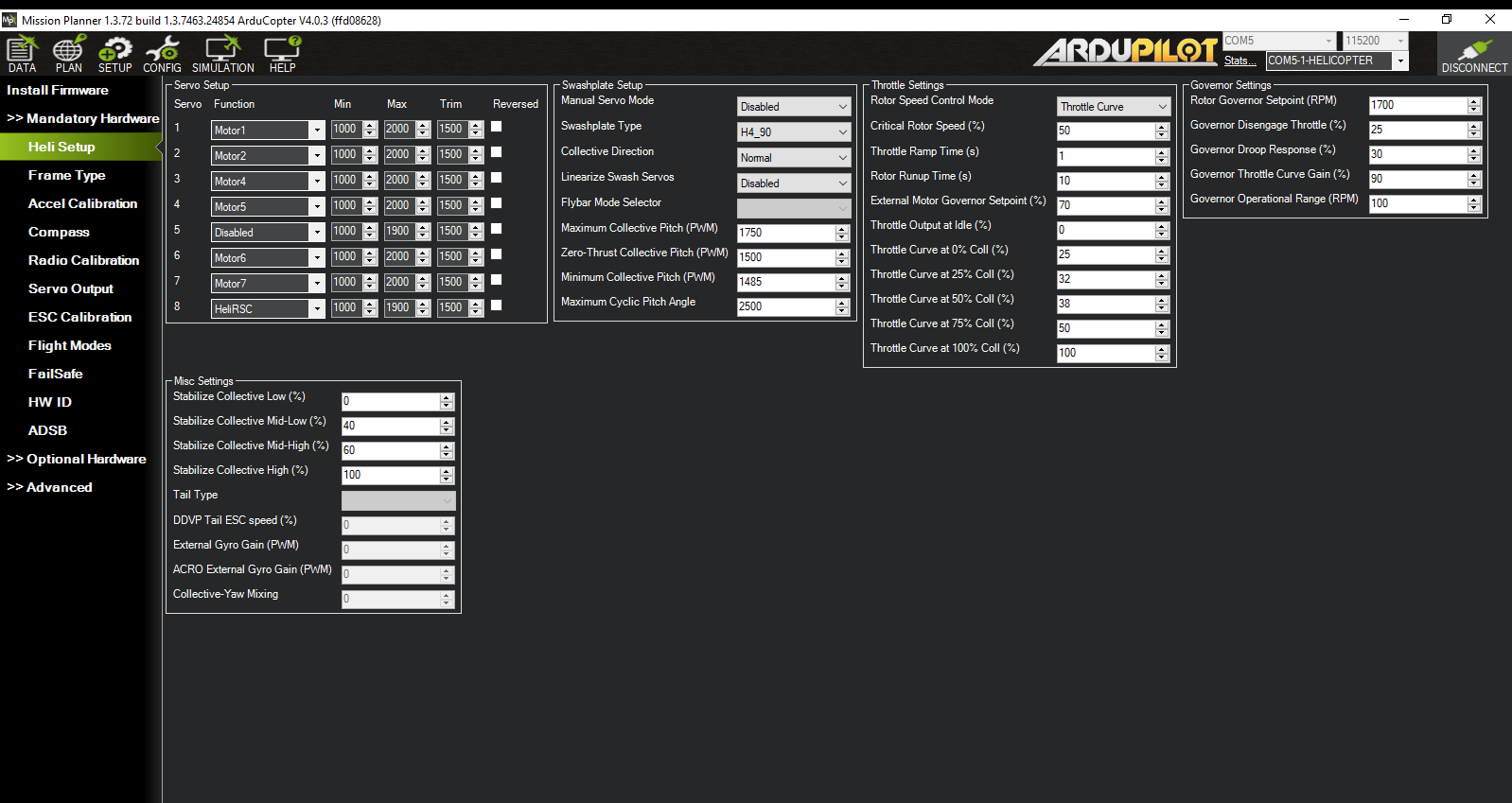
So it is what I suspected. You can disable servo 7 on the heli page and set servo 5 to motor 3. I never anticipated a user only using two servos per swashplate. So when you never assigned motor 3 to a servo then the code was unhappy. It says motor 2 in the error message because in the code it starts at 0 for the first motor number instead of 1. Even though you don’t use the servo outputs, you will need to leave servos 5 and 6 assigned to motors 3 and 6. Motors 7 and 8 are optional so it doesn’t expect them to be assigned.
IT worked perfect! thanks so much for your help! I just need a few more things to be able to get this thing in the air, cant wait to upload a video!