Hello everyone, after a 5 year hiatus I started using my UAVs again and ran into a couple of issues when upgrading to the latest 4.2.3 firmware, explained below,
Camera triggering issue
I have a couple of Copter 3DR UAVs (X8+ and Iris+), running version 3.4.5 and 4.2.3 respectively, I updated the Iris+ to 4.2.3 from 3.x about a week ago and after that I could never make relay triggering work, even though it works perfectly fine on the X8+ 3.4.5 with similar parameters/setup. I am using a regular USB trigger cable that works perfectly in the X8+, and a CHDK camera.
Here’s the relevant parameters I’ve set on the Iris+ running 4.2.3, the camera cable is connected via AUXOUT5
CAM_TRIG_TYPE = 1
CAM_RELAY_ON = 1
CAM_SERVO_OFF = 1100
CAM_SERVO_ON = 1700
CAM_DURATION = 1
CAM_FEEDBACK_PIN = -1
CAM_FEEDBACK_POL = 1
CAM_AUTO_ONLY = 0
CAM_TRIG_DIST = 0
RELAY_DEFAULT = 0
RELAY_PIN = 54
RELAY_PIN2 = -1
RELAY_PIN3 = -1
RELAY_PIN4 = -1
RELAY_PIN5 = -1
RELAY_PIN6 = -1
SERVO13_FUNCTION = -1
SERVO13_MAX = 2000
SERVO13_MIN = 1000
Unfortunately these parameters do not trigger the CHDK camera on the Iris+, and I’ve ran out of parameters to experiment with, am I potentially missing something here? The X8+ running 3.4.5 has almost identical parameters (except for the SERVO(n)_'s which were introduced in 4.x), and it triggers the same camera, with the same cable, perfectly. What else could I try here? I’m kinda out of ideas
Platform selection issue
This is the second issue I had, as I mentioned, these are 2 3DR UAVs that have a pixhawk FC, when I tried upgrading them to the latest version of Copter, I was confused by which platform was the appropriate for this FC, for example, the X8+ (3.4.5) shows the following info,
9/24/2022 12:16:28 PM : PX4v2 003A001D 35345107 34343430
9/24/2022 12:16:28 PM : PX4: de6b667d NuttX: 8c965992
9/24/2022 12:16:28 PM : APM:Copter V3.4.5 (83d39eae)
However, when I try upgrading the firmware in Mission Planner, it’s missing the firmware when I select the PX4v2 option in the platform list, so I’m a bit confused as to what I should select here. What I did was try a few options, and fmuv2/pixhawk1 uploaded correctly, however, I don’t know if these are the correct ones or whether they could be causing an issue like the camera triggering problem that I’ve described above.
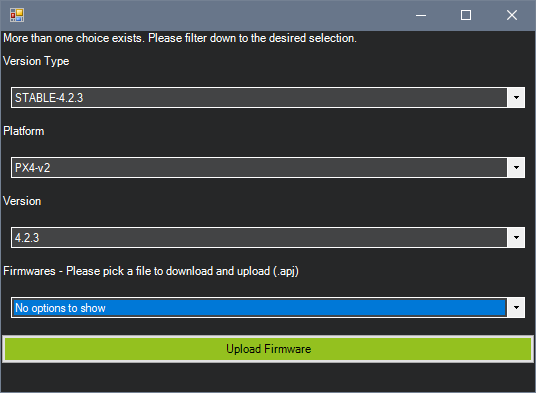
What would be the correct platform option for this UAV?
I’m hoping it wasn’t a lengthy post, but this is as much as I could compress the information, thanks in advance.