With the very kind help of many participants here, I finally got bi-directional dshot running, and rpm data for a dynamic notch filter.
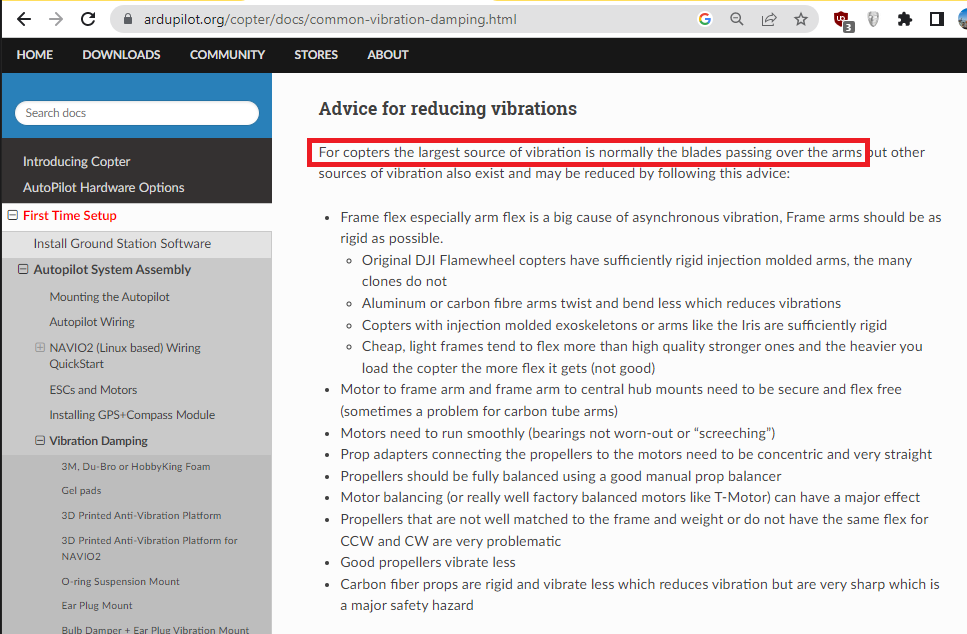
I’m trying to understand if there are relationships I should expect to see that validates that my configuration is working properly. For example - this reference in the wiki suggests that frequency of blade passage over the arms will be a major source of vibration:
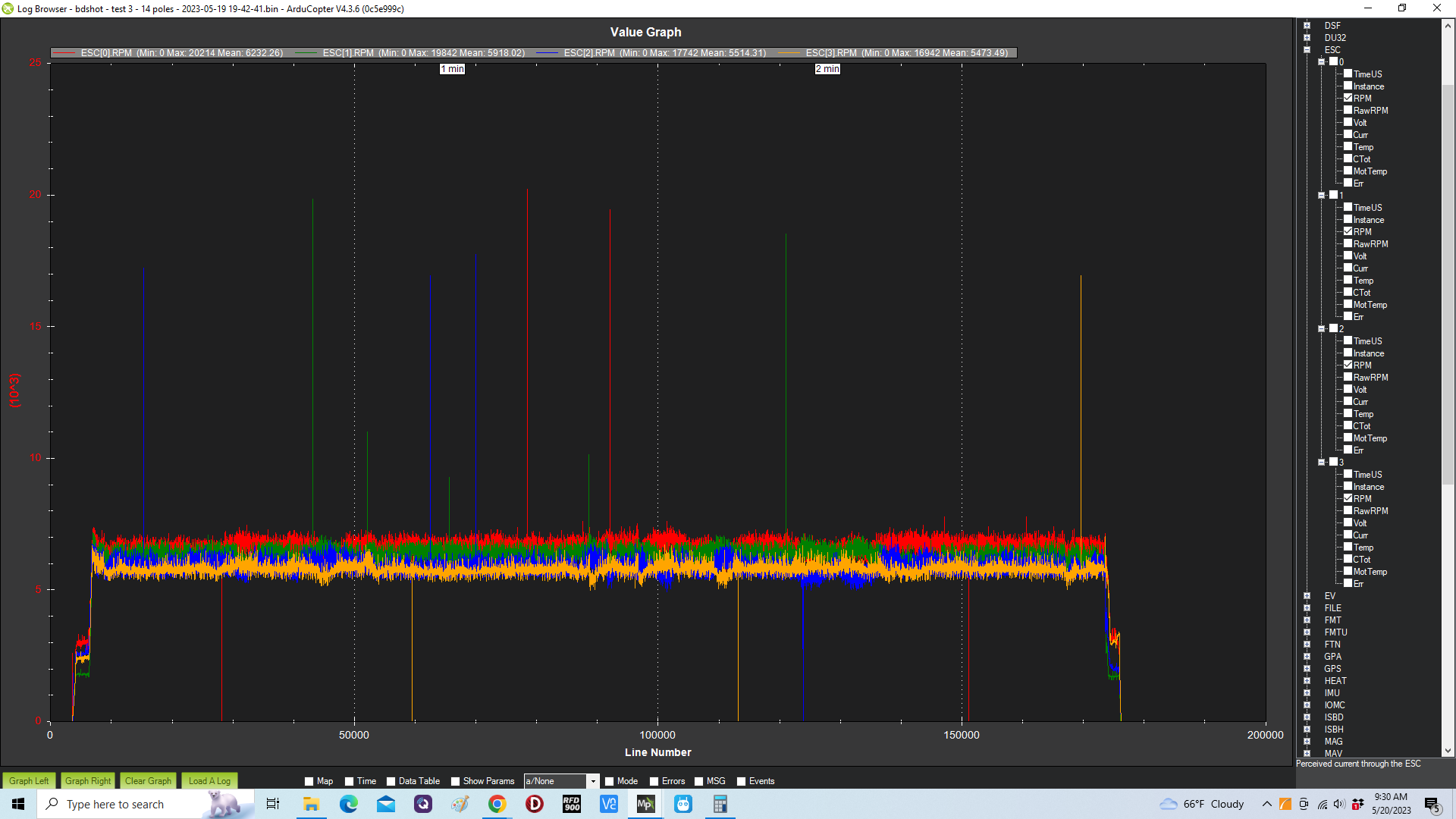
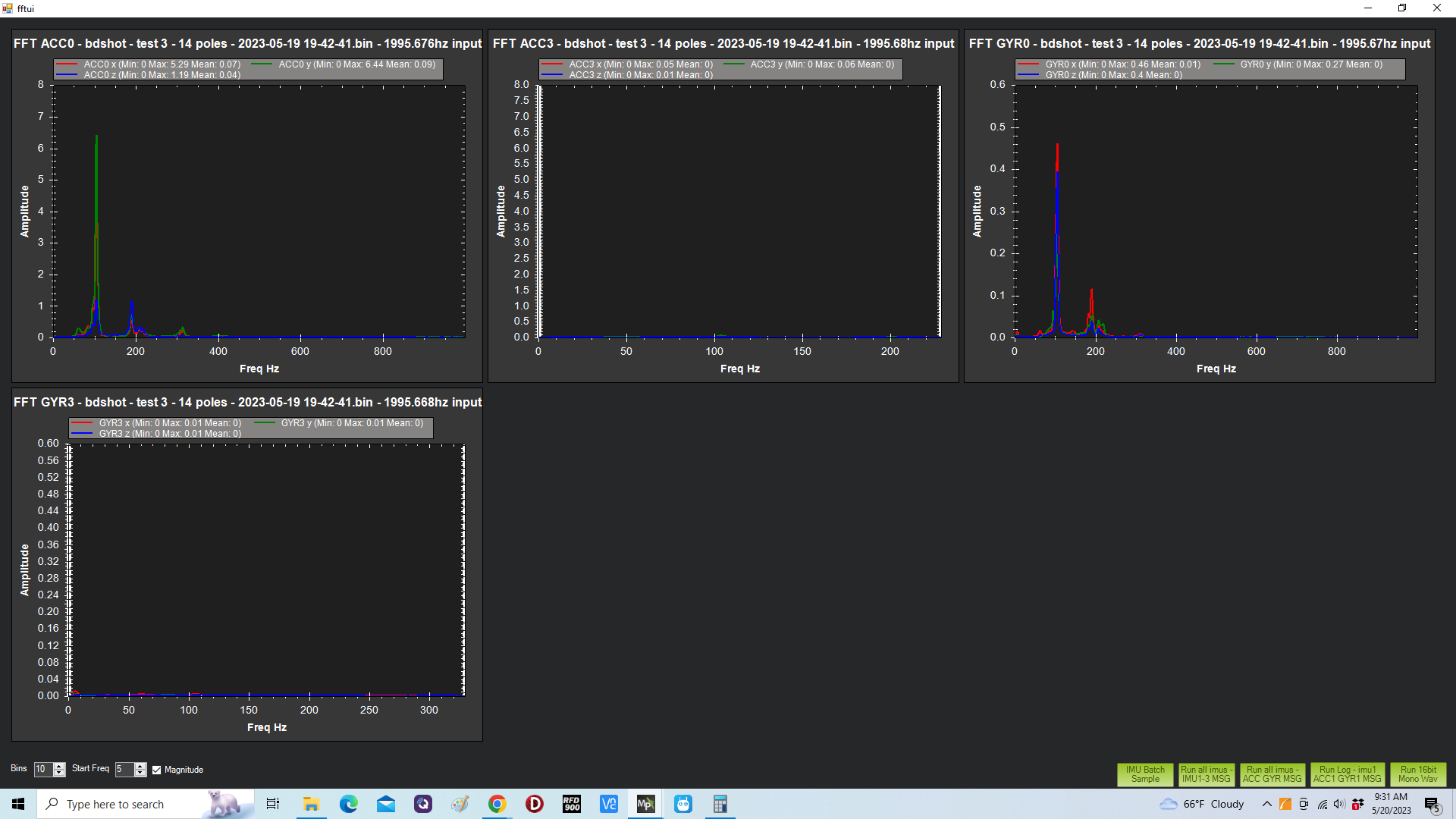
My data however doesn’t really show that. On a test flight the RPM averages around 5800 RPM in hover. The batch process vibration charts show peak vibration of about 100hz. I can’t yet see how four 2-blade props spinning at 5800 RPM can generate 100hz vibration.
Are there other factors I can take into account to help validate the performance data that’s generated?
But at 5800 rpm, there are two blade passages over each arm - as it’s a two-bladed prop. And four props.
I totally get it that RPM is not equal to HZ. But in light of the comment from the wiki, I’m trying to understand if there’s a relationship between RPM and vibration.
The idea is I’m trying to validate my data - if it is at all possible. For example - if I had the wrong number of poles entered, the reported RPM would be wrong.
This actually happened. T-Motor doesn’t report the spec on the number of poles on my motors. eCalc reports that it has 10 poles. I finally took a spare motor apart and verified that it had 14 - same as the ardupilot default. It was interesting to see the notch filter results with poles set to 7, 10 and 14.
Maybe there’s no expected relationship between rpm and peak vibration. If not - maybe there are other ways to validate that the notch filter configuration is correct. Thank you for taking the time to help me get my head around this.
With a vibration peak at 100hz, that translates to 6000 rpm - which agrees with my data.
I was misled a bit because of the mention in the wiki that it’s the blade passage over an arm that causes the vibration. With two blade passages per every revolution - that wouldn’t add up.
I’ve been thinking that having multiple motors might change the resulting vibration that is detected. But I guess because of some science and math I don’t yet have my hands around, four motors generating 100hz vibrations is still 100hz.
I’d been thinking how the phase of those motor’s vibrations might effect the vibration frequency experienced by the IMU. But I’ll save that inquiry for another day.
Blade passage is the next most dominant so you always want fundamental + blade passage harmonic. Different rpms is why “dynamic harmonic” exists giving you a notch per motor