Yesterday I conducted test of performance at different speeds and with different propellers.
The missions were four long out and back legs - each set of them at different speeds. The legs were in the general wind (about 10mph) direction - so the airspeeds (and associated pitch) was significantly different on the different leg directions. (downwind, less negative pitch - upwind, greater negative pitch)
I repeated the mission with different propellers.
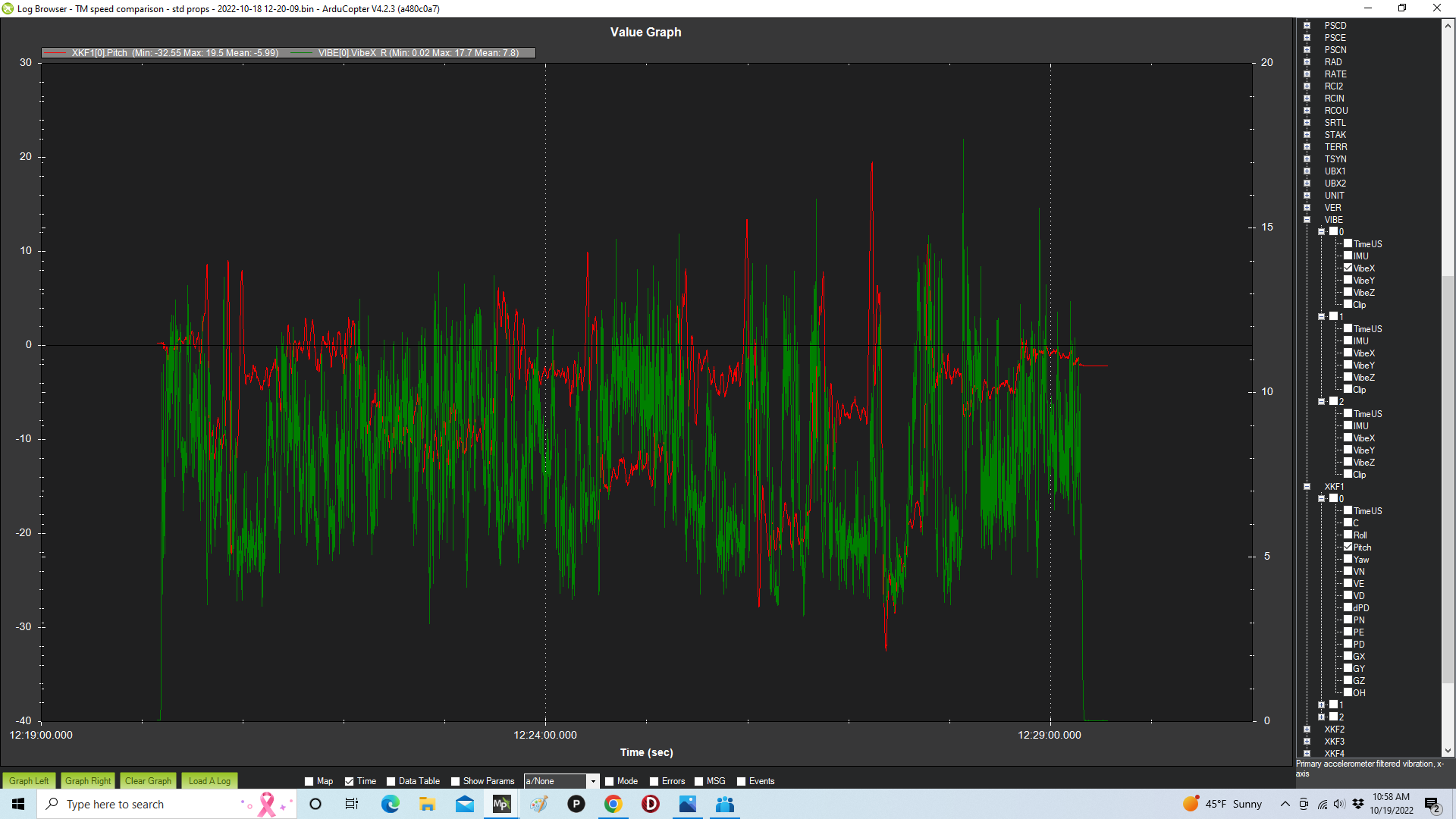
Reviewing the logs I noticed that higher vibe numbers than I’d observed previously.
Investigating that I found that in some cases vibe is higher when the negative pitch is greater.
I’m guessing that there are aerodynamic forces at work here.
I know far more about fixed wing aerodynamics than copter or quad-copter aerodynamics - and if there’s more to be learned here, I’d appreciate any input that is offered.
Thank you!
Note - for simplicity and clarity of the graph, I’ve only graphed the Z-axis vibe from one IMU.