Hi Bill and Chris,
After my first successfull setup,i am moving forward to the first step of tuning.My Rate is not smooth in my logs.My head speed is 2400 RPM and i have applied notch filter like this:
When i give stick movements,its kind of oscillates and then stables itself.I have logged with log bitmask 131071.
Could you please help me with my first step of tunning.Heli is electric Blade450 with flybar with a castle esc using esc governor with fixed RPMs.Thanks.
@ninja_zx11 sorry I haven’t responded sooner. Your data looks much cleaner with the notch filter set. I do see the oscillations you are referring to. Since you have a flybar on your heli, it is tough to tell whether you have too much weight in the flybar or it is the I gain that is causing the oscillations.
The other thing that I think might be contributing to this is that you may have too much VFF and could be overdriving the response.
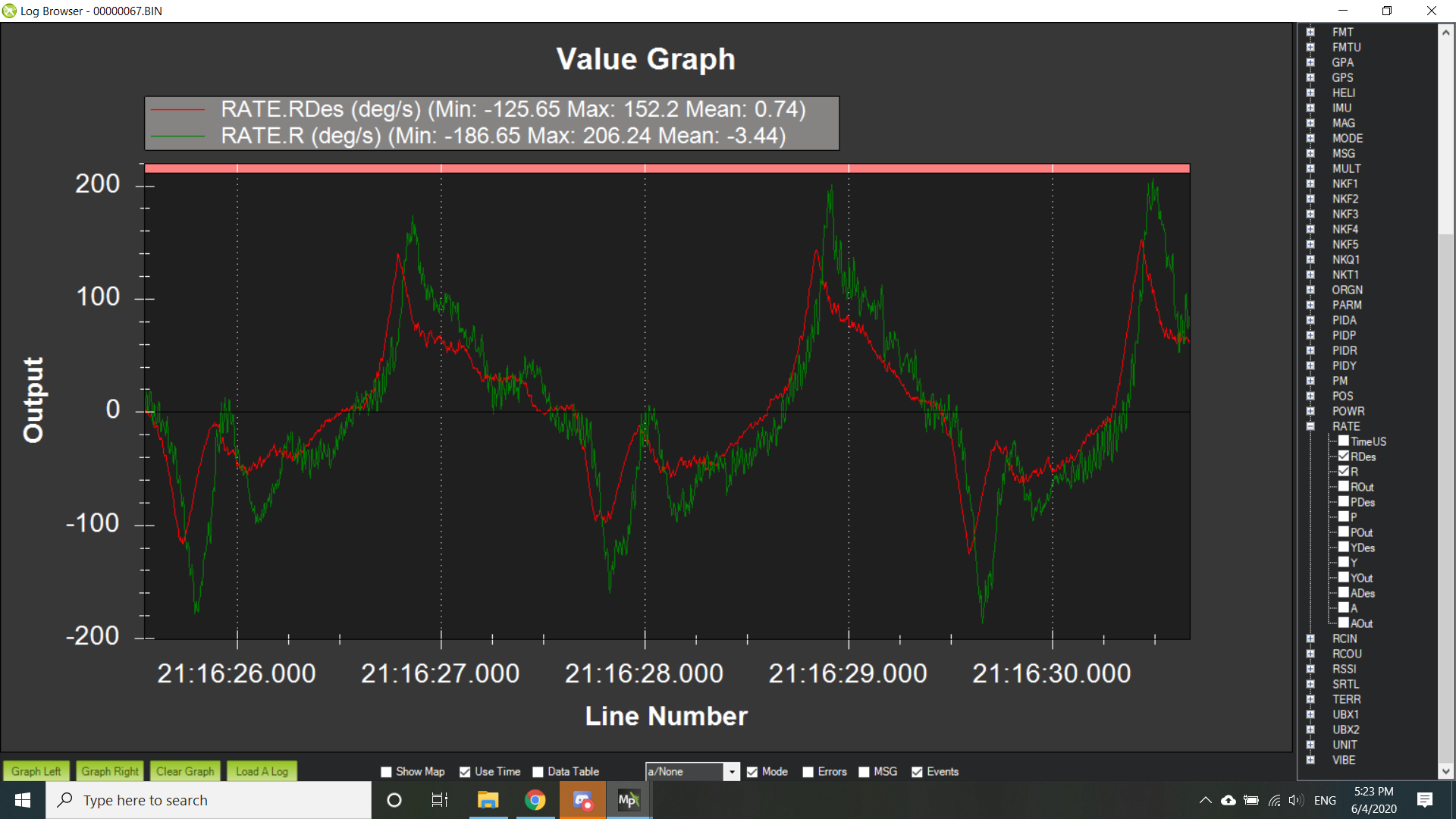
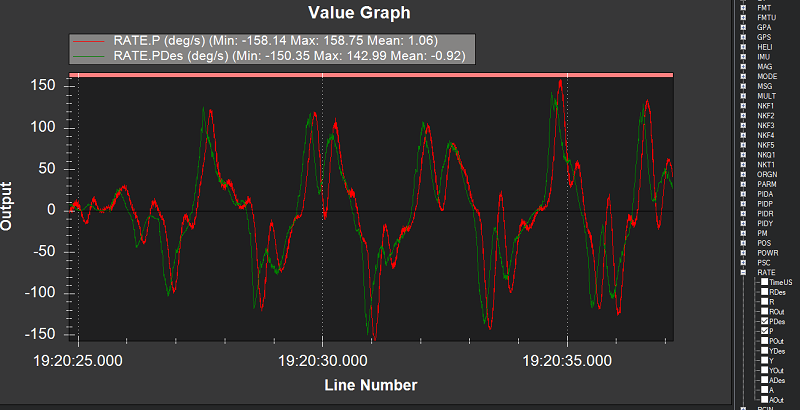
see how the actual roll rate (Rate.R) is much higher than the desired roll rate (Rate.Rdes). This is the same thing that is happening in the pitch axis. Set your VFF to 0.15 for both pitch and roll and fly again in stabilize mode. See if that reduces or eliminates the oscillations. You can look at these responses in mission planner yourself. you are looking to see that they peak at about the same height.
No worries Bill.Many thanks for checking my log.I will reduce VFF as you suggested.One more thing, I have analog servos on swash plate set at 50Hz but soon i will be replacing it with digital 120Hz.
I also noticed that heli flies stable at low speed but as soon as i spped up to 11-12m/s,it starts oscillating badly and then i have to let go the forward cyclic and change the collective to recover it.
Is there any need to tweak notch filter more? I will report back soon. Thanks for taking your time.
That’s good. just return your RC_SPEED parameter back to 125.
I think this is due to the same thing that is causing the oscillations which I believe is too much VFF.
I don’t think so. You could use the harmonic notch filter rather than the static notch. The harmonic notch will clean up any noise due to higher harmonics of the rotor speed. Up to you.
@ninja_zx11 remember that with a flybarred heli, do NOT tune the ATC_RAT_PIT_P and ATC_RAT_RLL_P or the the ATC_RAT_PIT_D and ATC_RAT_RLL_D gains. Your flybar is do this for your rotor head. No need to tune those gains. Leave them at zero. You just have some I tuning but you will have to set ATC_RAT_PIT_ILMI and ATC_RAT_RLL_ILMI to 0.08
Did the oscillations go away?
The delay is pretty typical. Part of it is the time it takes for the rotor head to respond and the other is the lag of the servos but yours is pretty typical. Servos will help but only a little. The majority of the time delay is the rotor head.
Tail remains normally steady but if i give a quick collective then it moves little.Do you think if it needs some adjustment by seeing log?I have allready mechanically adjusted so that at servo’s neutral position,it almost holds the tail. Here is the log.
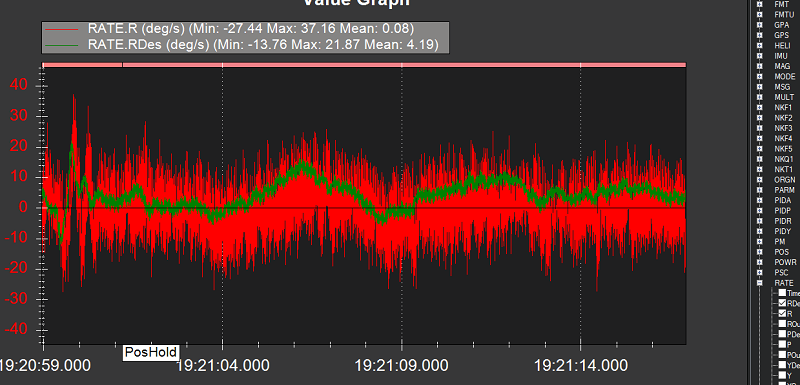
Yes its from my recent flight but this plot is from the point where i was just hovering in position hold mode without any big stick movements.I have posted my log from my recent flight in my last post.
So should i make some changes in notch filter?Thanks.