Log: https://drive.google.com/file/d/1XS7xCzSawYu_guJtJrSXuC4I2OyJChLV/view?usp=share_link

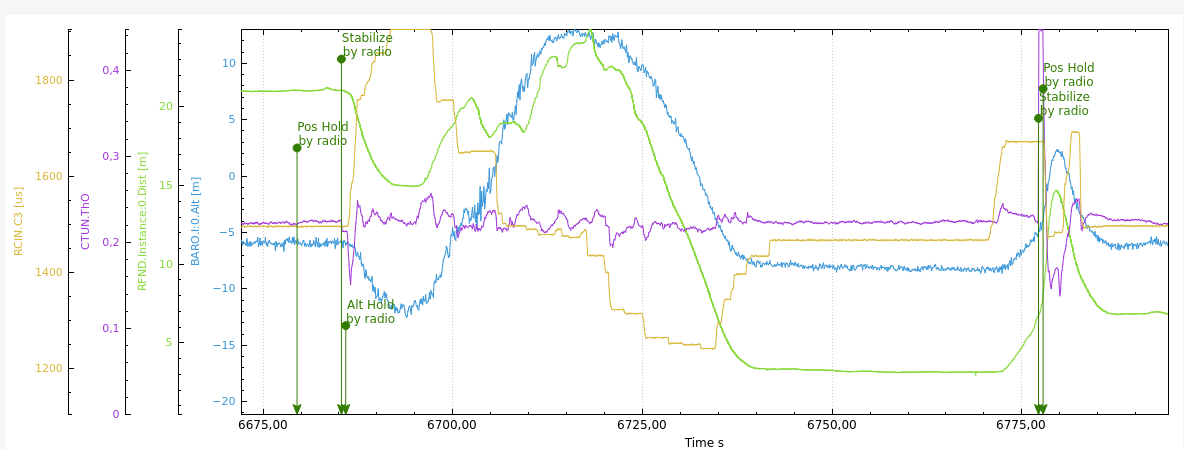
Please check out this part of the log … the copter is flying slow at 8m over terrain, and after a turn, loses altitude and then overshoots several times.
This is not reproducible every time.
Another -probably related oddity is that in Alt.hold a very high, or full throttle input is barely climbing.
parameters:
00000058.BIN.param (15.2 KB)
Please suggest improvements.