I have a Skywalker who flight well in every mode despite it sometimes decide to go direct to ground without control.
First crash was at first flight in manual so I thought that maybe I did something wrong on didn’t enough glue the elevator.
Second crash after 15 good survey flights in auto. This time I thought that’s because I didn’t fix enough the battery.
Third crash after 10 flights. This time I thought it may have been the battery who did not have enough power because it was the end of the flight.
This morning it could have been nothing of the above. Everything was working fine, sunny day, no wind, nothing I could think about to explain the crash.
I have change the tail and the elevator servo between second and third crash, and glued the elevator.
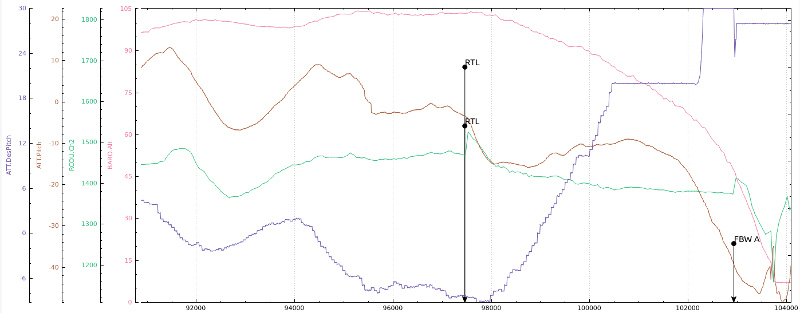
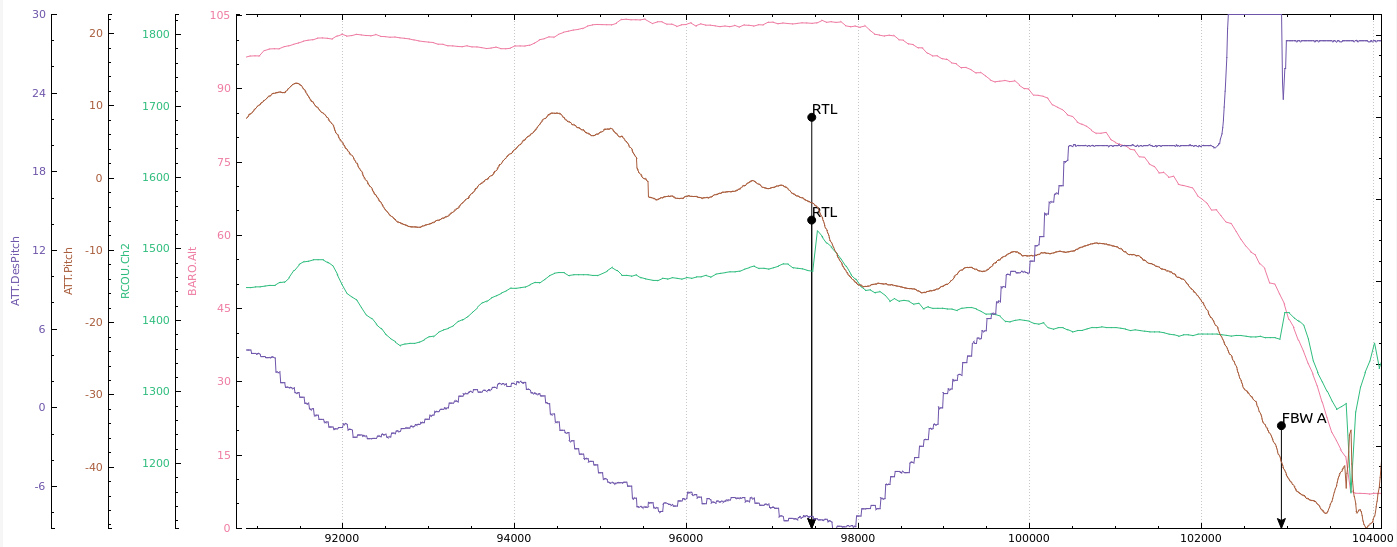
This morning my plane go straight to ground after engaging RTL after a very small auto mission.
I tested RTL two days ago an it was fine. HDOP at crash time was 1.7.
It loose altitude from 100m AGL to ground at full throttle and -30°, so it is not a stall.
My action on the pitch as no effect, even in FBWA.
I re-plug the battery after the crash and the elevator was working fine, so it was not disconnected.
I admit that it is not perfectly tuned but he was comfortable to flight.
After damage repair I’m unable to make servos move. The motor beep continually, indicating that the ESC receive pwm signal above min throttle. Servos stay at middle position.
But everything seems working : GPS, telemetry, ccompass, radio calibration, arming button, led status.
I try connecting via serial consol as describe here : http://dev.ardupilot.com/wiki/apmpilot_project_developer_information/interfacing-with-pixhawk-using-the-nsh/
But using command :
pwm arm
pwm -c 2 -p 1100
Did not do anything.
I try to disconnect everything, upload rover firmware… But nothing help !
I made a manual flight yesterday, without Pixhawk, and trim the plane.
Today I do the radio calibration, compass calibration and ACC Calibration.
And I do two fly that goes well with repeating a small mission dozen time, with switching mode : Auto->RTL->FBWA->Back in auto : http://www.droneshare.com/mission/95510 http://www.droneshare.com/mission/95509
And no problems… this time. I still have no explanation for preceding crashes.
graph RCIN any C value I chose c1 it looks like your rc connection to the plane is down more than its up after about 3 min.
A graph of desired roll vs roll shows the plane totally unresponsive after about 3 min
and alt shows 100 slow decent to 0 at 3 min
So im guessing the above indicates post stuffage.
It appears right before impact there was a large divergence between pitch and desired pitch. The autopilot had commanded the max 30 deg pitch angle and the plane continued to increase dive angle approaching 50 deg
it appears the autopilot was working but the plane failed to respond despite having plenty of airspeed.
Mechanical failure of servo or linkage perhaps…
{kind=link}