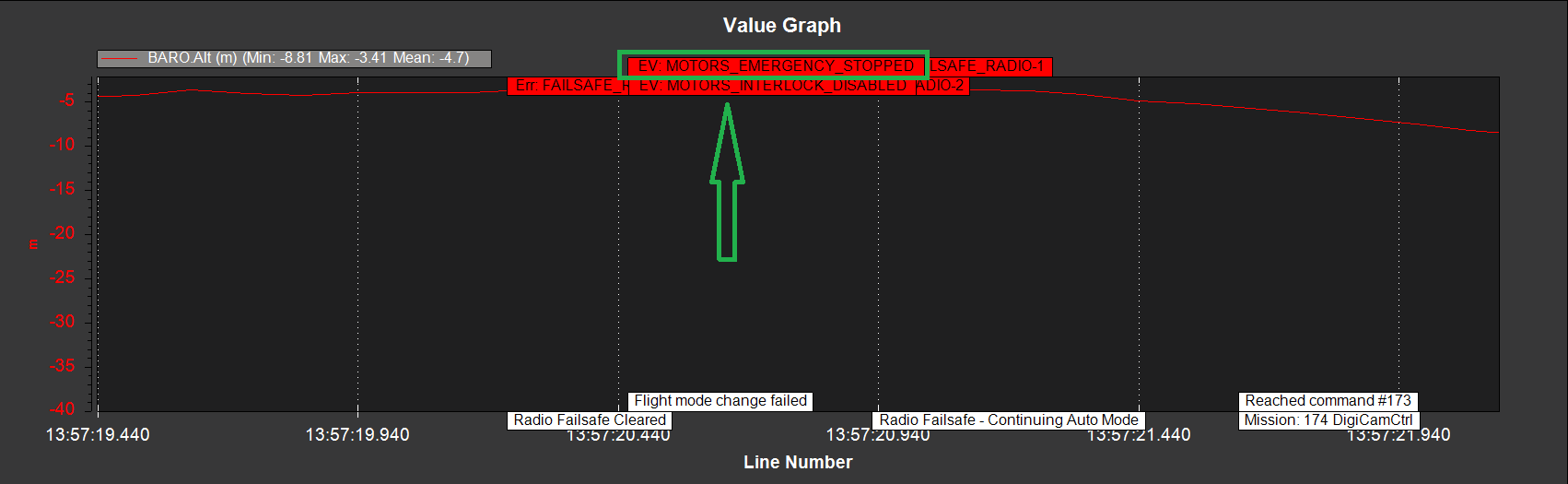
Today my copter crashed, it disarmed in mid-air and the only clue is the radio failsafe, the copter disarmed right after radio failsafe trigger and the FS_OPTION bitmask set to continue with auto mission trigger.
This copter has more than 120 hours on auto mission, It dont have high vibrations and the only clue is something with radio failsafe.
Every flight I have RC FS, never had problem, but today it disarmed while flying.
That is the my second crash with the same clues.
Now its the gold question, how to avoid this to happen, better saying, never happen again?
I use the motor stops for emergency situations, to prevent bad things to happens, so I have Rc7 with this feature, I really dont want to desable this thing to keep my safety. Maybe I should use two switches in the same time to trigger? Now I have only one swith, when its high, it triggers, how about using two, like flight mode change?
In my RC transmitter (taranis X9D plus) I dont have any failsafe set, perhaps I should use one? Like no pulse, hold or other thing to prevent this?
Basicly I need help to avoid this terrible problem.
Check your radio config again there must be a configured failsafe
Im using QX7 with X8R, when i lose signal all channels will be 0 and not triggering anything on fc
To reiterate: this is a receiver setup issue. ArduPilot is doing exactly what it is being told to. You need to read the manual for your receiver, and ensure that you set the failsafe behaviour correctly.
If you have a parachute on your drone, and it’s configured right, the drone will emergency-stop itself and blow the chute out. If it’s upside-down on the ground, the crash-check will stop the motors faster then your feeble human reaction. If the drone is mid-flight, switching to stabilize and nursing it back to ground is actually safer then it going ballistic after emergency-stop.
Never, in my 10-years history of flying multirotor drones, can I fathom an event in which a motor kill-switch would’ve saved the day.
In my case, I have to use a couple of times, becouse I work at farms and the terrain isn’t very stable, always have something to force the copter bend when it land, so to avoid the propeller hit the ground, I use motor stop before it hit the ground.
In others crashs was very useful, I had 2 crashs that the FC didnt reconize as a crash and kept the motor running at full power, so its faster to use motor stop than disarm feature.
Any way, is there a safe option to keep this feature in my RC but with 0 chances to trigger by it self?
This question is for everyone, taranis X9D has 4 type of failsafe, i’m planning to use no pulse, this way when a failsafe triggers the RC will not produce pulse in any channel.
Or maybe hold, it will hold the last positions before FS.
There is two more, custom and receiver, but I didnt understand what it does.
Anyway, both hold or no pulse will make the RC dont trigger any channel, right?
I have always set No Pulses. You don’t want Hold, the FC won’t be signaled to take FS action. Remember that plenty of RC Planes don’t have a Flight Controller at all so FS action has to be done on the Rx. The manufacturers have to address this with various FS modes.
If you didn’t set anything didn’t you get a warning on the Tx everytime you selected that model?
It didn’t disarm in mid air, the thread title is wrong. A configured Emergency Stop was activated causing the motors to stop. Nothing like what happened to your craft other than the same result of rapid return to earth.