Good afternoon everyone,
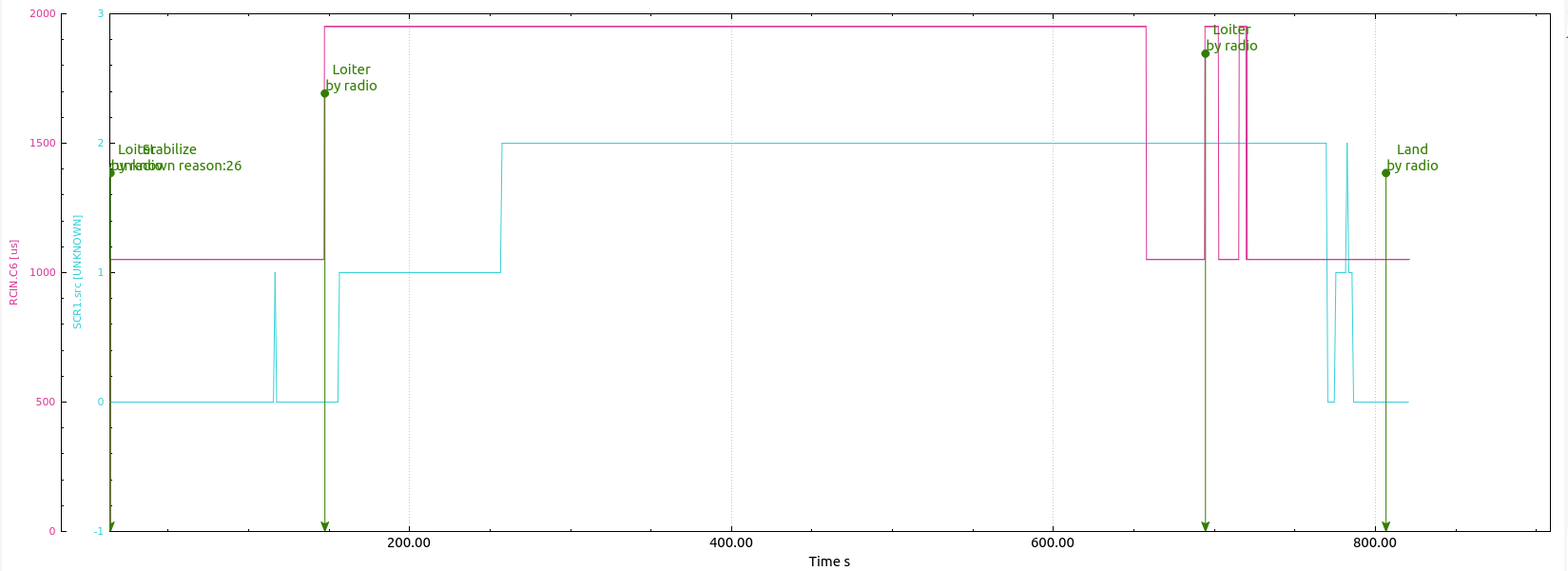
Today, we did a test in which we took off using GPS yaw, and made it failed during flight after making sure that the GSF had converged. Thus, a Lua script could switch automatically to source 3 that uses GSF. So far, I daresay that the multiple-source feature works beautifully and that the Lua scripting is a very powerful tool for defining conditions for source switching. After being able to keep on flying successfully using GSF, we landed without issues and disarmed. However, we noticed that we were capable of arming again at about 695 seconds even if we still were in source 3 (GSF) after landing. In the plot below, SCR1.src records the actual source used by the drone (0, 1 or 2) and in this case a value of 2 corresponds to source 3:
I am not sure if the GSF is intended to keep on working after disarming since it is based on velocities and it can start accumulating error. Judging for the log, I do not think we would have had any issues if we would have taken off again since it did not pass too much time since we landed for the GSF to behave poorly; the standard deviation (XKY0.YCS) was still very low:

Please find the log below:
My question is if the GSF was intended to continue working after landing and disarming, and being a valid source of yaw for taking off again?
PD: Thank you all for this new firmware! It is a great Software and we definitely love being able to add redundancy. May be not related, but something to think about. Would you foresee having more than three sets of sources in the future? I can see a lot of scenarios where it can be very beneficial to have the capability of defining more combinations of correction sources,