Hi, we were flying an 3.5meter wing span in automation for endurance test. We have had successful flights earlier with same configs but this time after QRTL the drone started losing altitude quite fast and manual commands didn’t work as well. the drone had quite a hard landing. We couldn’t figure out the reason for this situation. there was no thrust loss message either.
I am attaching the log link for your reference
Logfile
Motor outputs were maxed out:
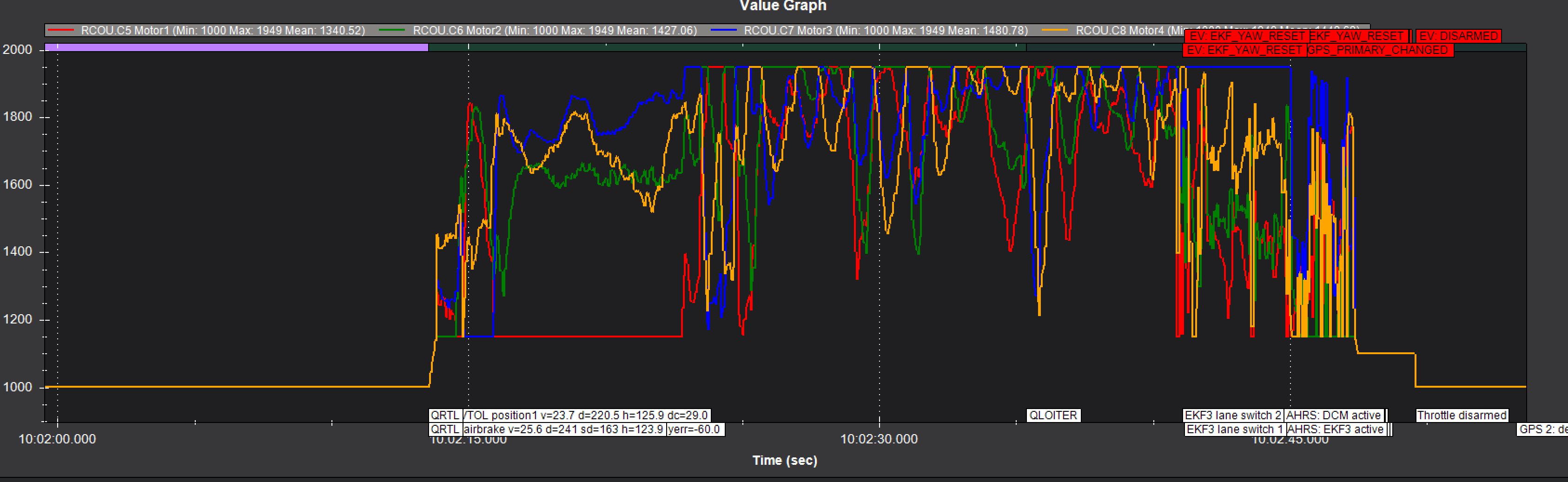
Based on Q_M_THST_HOVER,0.684 it looks like you could use > thrust/weight.
Did you exceed your battery capacity?
Log shows 16,600 mAh used prior to entering QRTL.
And it looks like voltage was dropping pretty quickly at that point too.
make sure your thrust-to-weight is above 2. if less than 2, the aircraft will drop if attitude outputs are high (attitude controller digs into altitude budget, can be fixed with code modification).
1 Like