Hello,
we are experiencing problems in navigation tuning with Skywalker X8 based quadplane. The problem is the intolerable poor navigation performance especially referring to mapping mission.
Before taking care of L1 NAV tuning we spent a lot of timetrying to improve roll perrformance but we still have problems that are affecting the overall response during navigation.
Here what rool loop is doing:
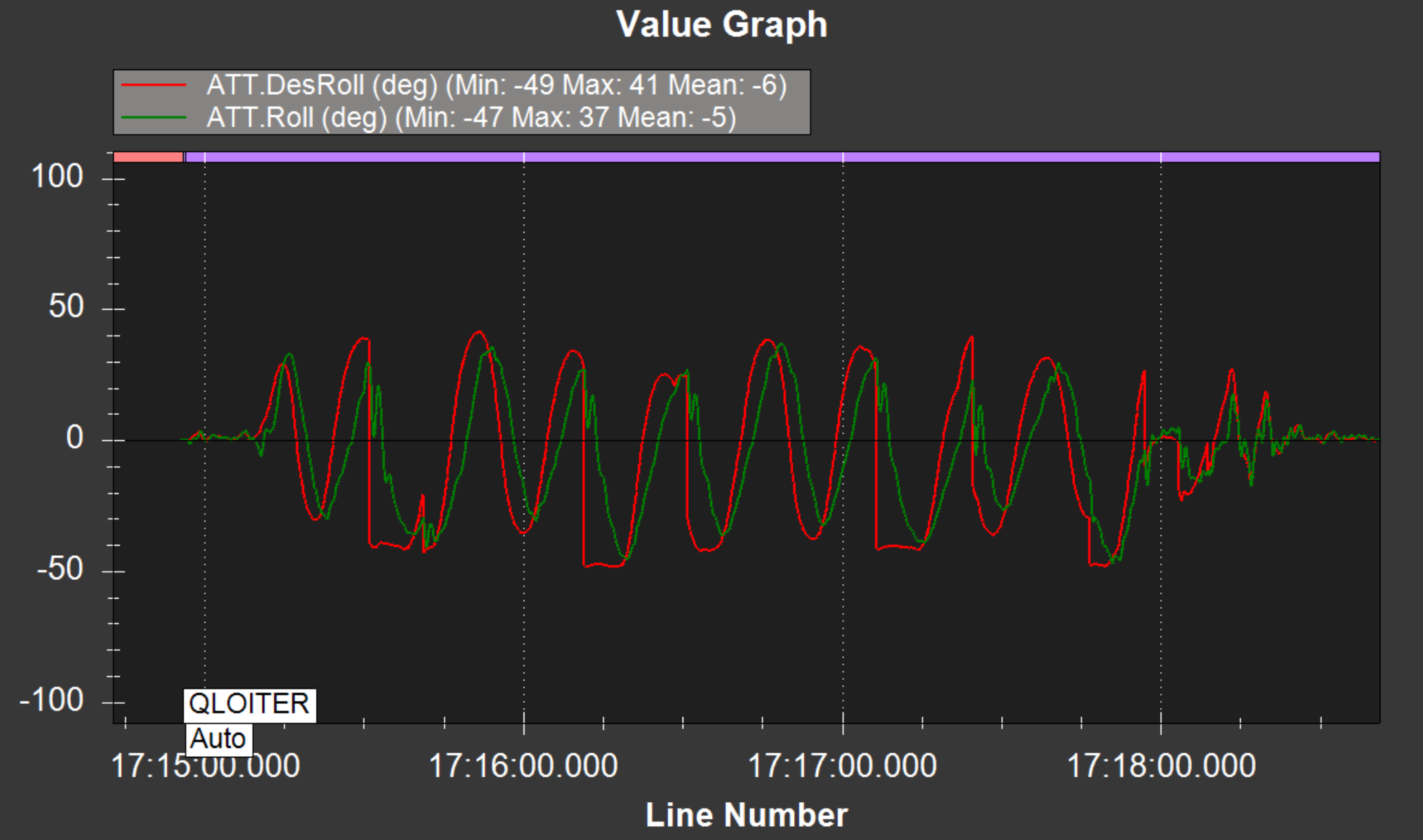
The plane is basically following the desired loop but with a lot of delay with a remaing osclillation everytime the demanded roll changes quickly.
We tried a lot o different values in all roll loops, without being able to completely take rid of this behaviour.
The frame is a standard X8 with added lifting arm which are of course increasing momentum around londitudinal axis.
T.O. weight is about 6.5 kgs
Here’s the link do download log:
https://drive.google.com/drive/folders/1trNVGtZT1XoQzDdsuj0h8CyyK3eP7SYn?usp=sharing
Many thanks in advance.
Daniele