farstein
November 8, 2016, 3:10am
1
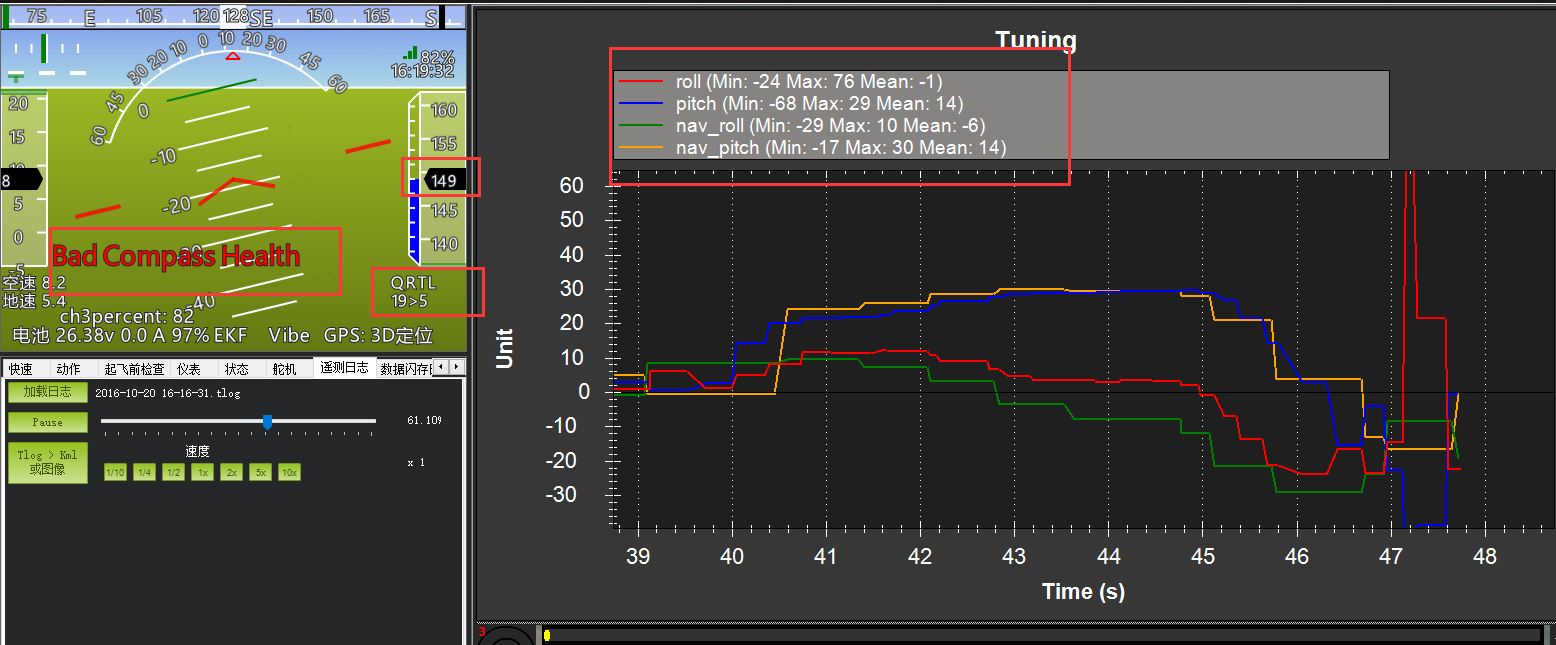
At first I did an auto-fly plan(Attachment:Flight Plan.txt). Everything was working normal as expecting. But something went wrong when it entered into QRTL.
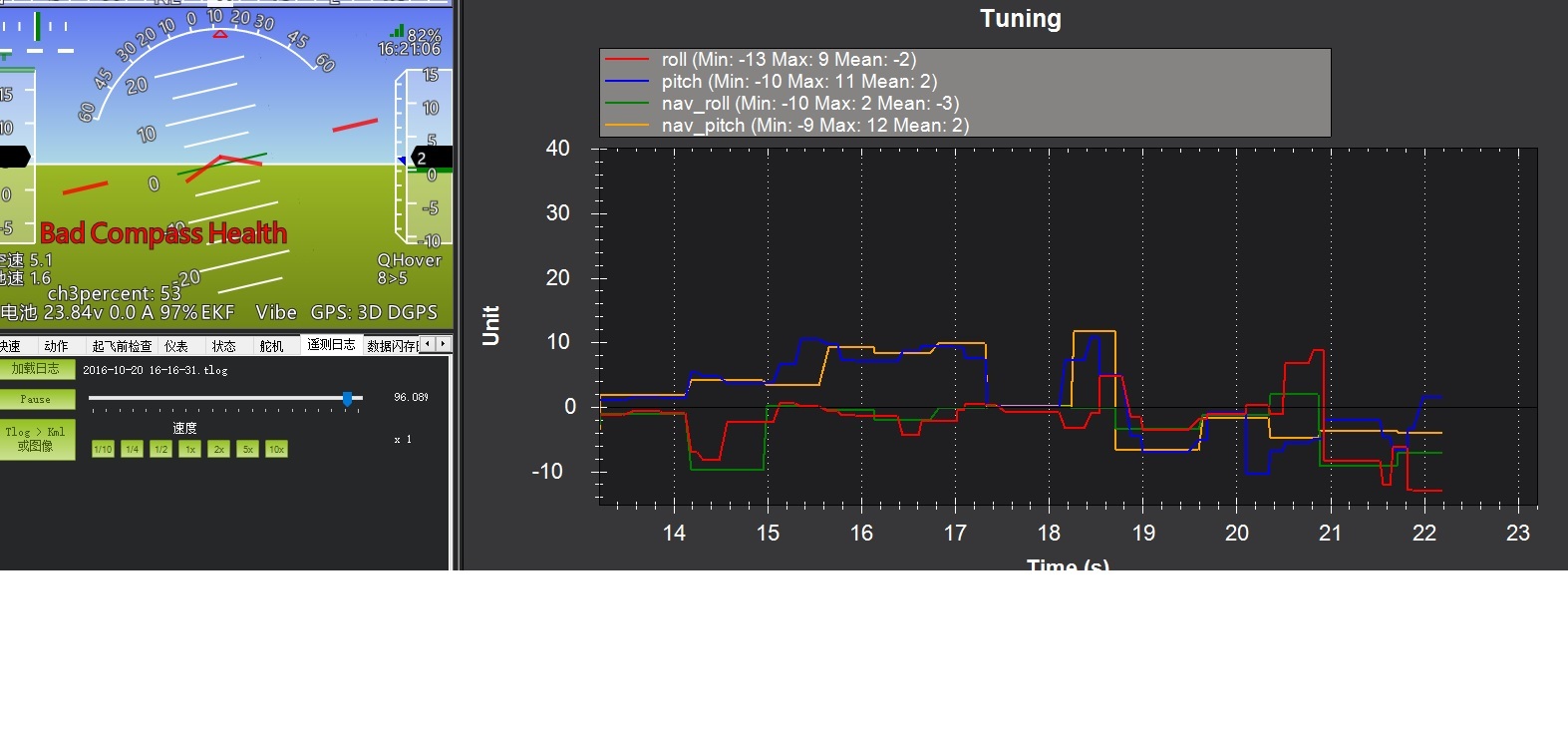
When this happen ,I changed mode to Hover, but it’s very hard to control. Shown as below.
Flight Plan.txt (429 Bytes)
2016-10-20 16-16-31.tlog (406.5 KB)
Error Log.log (3.8 MB)
farstein
November 9, 2016, 12:55am
2
@tridge & @MagicRuB I really need your help. This problem cost me two quadplans
MagicRuB
November 9, 2016, 3:29am
3
Hi @farstein
Sorry about your problems with your quadplane! It seems this log file may have been edited, would you mind posting the original .bin?
The log does not show you taking off in auto to perform the mission you’ve posted here.
farstein
November 9, 2016, 4:27am
4
OK,thanks.https://pan.baidu.com/s/1qXDVQ80
farstein
November 15, 2016, 4:46am
5
@MagicRuB
farstein
November 22, 2016, 6:16am
6
Hi, Magicrub, have you downloaded my log?
MagicRuB
November 22, 2016, 5:28pm
7
Looks like a total compass failure, the log data for MAG and MAG2 just stop shortly after takeoff. What kind of hardware do you have?
farstein
November 23, 2016, 8:03am
8
pixhawk I have. Two compass.