I’m configuring a 7 inch drone, switched from triblade to biblade props for more efficiency and now wouldn’t take off, but i already flew with both props so i’m sure this isn’t a power to weight issue, also it did the first takeoff succesfully but had to land almost immediately due to an EKF compass variance error, after that it won’t takeoff anymore, like the throttle was clipping to a certain value.
Also hover throttle was set to “learn and save” so it should have seen that the value needed to change to hover, but looked like it didn’t.
I leave you the logs, first one with triblade props, second one biblade, just changed the props but not anything else.
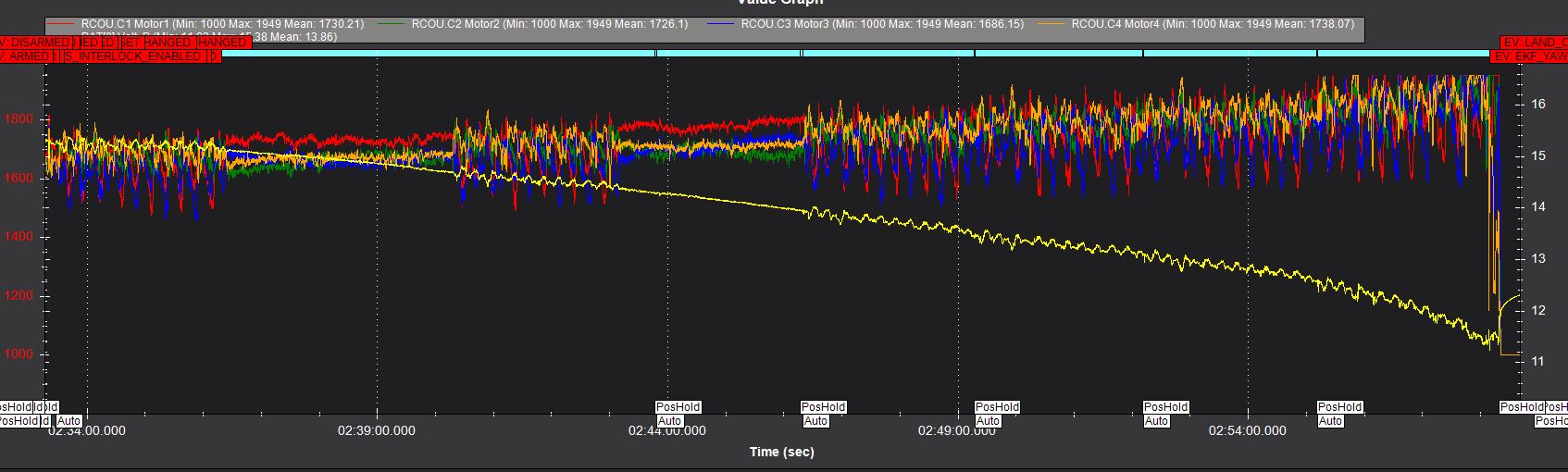
Assuming that the 04.bin file is the tri-blade it’s underpowered/overweight already and I suppose the bi-blade props make it worse. The outputs are at max and MOT_THST_HOVER has learned 0.6. And your battery has sagged to ~11V. But even when it was at full charge the average outputs are ~1700us.
The 04.bin file should be a 25 minutes long autonomous mission that i let run until battery was almost completely discharged, that’s why it sagged to 11v towards the end, because there was no battery left, but it flew perfectlyuntil that point.
I don’t think so. From the start its underpowered/overweight. You are asking for trouble w/o improving this. And you will damage the battery discharging it that low.
Describe the components of this craft and it’s take-off weight (with battery), let’s see what the data says.
it was an endurance battery test so it was supposed to run until the end, to see how much time it could stay in the air with this setup.
Also, by flying perfectly i mean that it followed the planned mission without any issue, no any unexpected behavior, current draw always around 10 amps, and altitude was always followed as planned.
It is a 7 inch quadcopter, 2812 925kv motors, weight around 1.1Kg with 4s2p 21700 Li-ion, with the triblade props i was able to test some short missions with an added 500g payload and was able to lift it and keep it perfectly stable in the air, also gaining and lowering altitude without overshooting, always in auto mode.
I don’t know why you say from the start is underpowered, in stabilize or acro mode i’m able to make it hover at around 35/40% throttle with 4s and triblade props, i don’t know also why at the start of the log it shows 0.64 hover throttle but you can see when i start the mission (time stamp 11.35.00) it learns to around 0.45 the new value
With that bit of kit and 7045 tri-blade (you don’t give the pitch) one would expect a hover throttle of ~70%. 50% or less is the design target. The RCout graph shows an average of~1700us at Hover which is what one would expect with this low of a thrust/weight.
A MOT_THST_HOVER value of .45 is not desirable, it’s high. It’s not a linear relationship of throttle to thrust, that’s why we use RCout as a better Metric of thrust/weight.
So, the craft lacks thrust and clearly 2 blade props exacerbate this problem. “Not taking off after changing props”. Yes, right.
7045 prop already indicates the pitch: 7.0 inches, 45 degrees. The setup was chosen to maximize flight time and reduce amp draw, that’s the reason for using very low kv motors, but now that i remember i think i was using a 6s battery when i tested those props, so in the future it’ll be powered by a 6s battery and this should definitely solve the underpower issue, thanks a lot for the RCout explanation, will be very useful.
One last thing i’d like to ask you: why every time i make an auto analysis of logs, i always get this two errors?
bingo that would make all the difference in the world!!! don’t use auto log analysis. it should 100% be removed as a feature because it just doesn’t work! I have seen so many folks use it and then get berated for using it yet they will not remove or update it. log analysis is a tricky thing but the auto log analysis doesn’t help, it more hinders as users run it then wonder all the issues that come up when its really just outputting garbage.
Thanks everybody for your help, changing the battery to a Li-Ion 6s2p solved the problem. Now i can fly with biblade props as well, but i’ll have less efficiency because with full battery it’ll hover at 50% throttle, once the battery sags to 19/20v it will start getting thrust loss issues. With triblade props i can hover at 25/30% throttle with the same amp draw, and will be able to use all the battery down to 2.8v/cell. On an auto mission stress test, i wasn’t able to get more than 11/12km with biblade, but i did almost 18km with triblades!
Just ensure all your battery failsafe levels are set correctly and MOT_BAT values.
BATT_ARM_VOLT,19.10
BATT_CRT_VOLT,18.00
BATT_LOW_VOLT,18.60
MOT_BAT_VOLT_MAX,24.60
MOT_BAT_VOLT_MIN,16.80
and
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 (or 3 for smart RTL)
The link to your log has expired so I couldnt check.
Old timer here and not that it is a big deal- but FYI, the pitch is a number relating to forward travel in one reveloution, not a degrees number.
From Master Air Screrw.
“Pitch indicates how far, in inches, that propeller will move through the air per single revolution of the engine (i.e. every single complete turn of the prop). However, the pitch measurement must only be taken as a guideline because real-life factors influence the actual distance eg the prop material, its condition, efficiency, air density on the day etc.”
So pitch measurement is really only a theoretical value, but it is good enough to help you choose the right size propeller for your airplane’s performance requirements.