The aircraft does not fly very well at all. If I give it any large increment in power, the aircraft starts to oscillate. I also tried to land the aircraft in loiter and got a large oscillation about a meter off the ground that led to a crash. The aircraft seems to have plenty of power, I tried reducing the sampling rate for the input and that had little to no effect.
I am attaching the logs for a few flights.
The final log is the log where I had these props on the aircraft, the other logs are with smaller props (https://www.kdedirect.com/collections/multi-rotor-propeller-blades/products/kde-cf125-tp) and I incremented the weight on the aircraft up to 2.5lbs, the aircraft is unable to fly at this weight with these props. Any help would be very much appreciated.
If it’s standard configuration then your CW props are working a lot harder to match your CCW props.
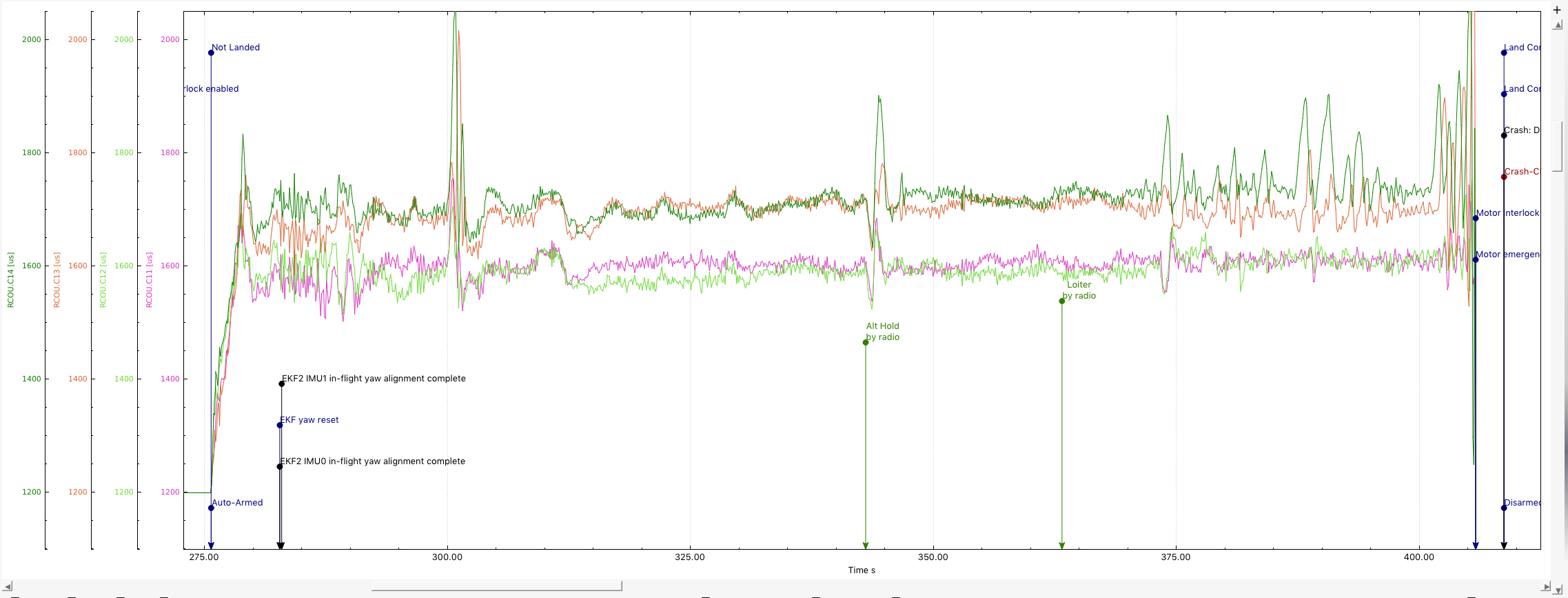
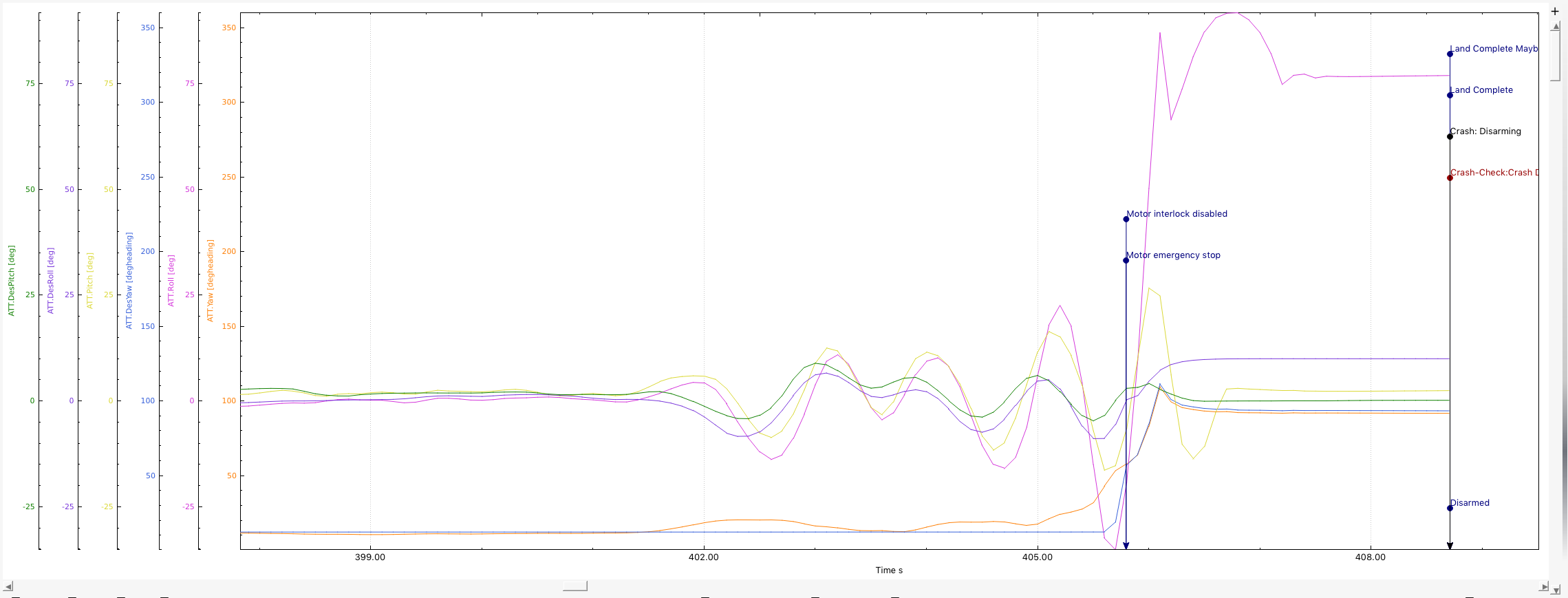
The desired v actual looks about right for an untuned copter, until of course it looses the plot at the end and rolls over.
Thanks for checking on this for me. I have the motors plugged in in the same order as I would if I used the standard setup. Should I switch back and use the standard outputs?
Currently I have motors 1-4 on Aux
Motor 1 is CCW, Front Right on Aircraft, AUX 3, Motor A in mission planner
Motor 2 is CCW Rear Left on Aircraft, AUX 4, Motor C in mission planner
Motor 3 is CW, Front Left on Aircraft, AUX 5, Motor D in mission planner
Motor 4 is CW, Rear Right on Aircraft, AUX 6, Motor B in mission planner
I dont understand what would cause a thrust imbalance? Or how to counteract that.
Okay Thanks. I made some changes, got some decent flights in loiter and auto. I tried an auto takeoff and it got into an oscillation on takeoff.
I am attaching logs and I also switched back to using the standard motor outputs, instead of Dshot outputs.