Yes, this allows you to adjust each tiltservo precisely (SERVOxx_MIN/MAX/REVERSED ).
I suggest first to test QStabilize and Qhover flights like a copter. Then - without props on the bench- first test correct aileron/rudder/elevator moving in manual AND FBWA mode before real flight.
If you use an airspeedsensor, make sure it is calibrated correctly.
Thanks, Rolf! If I understand correctly, this will allow me to adjust for centering differences among the four tilt servos. I truly appreciate everyone’s input into this discussion.
New question. I have been reading about powering the pixhawk servo rail as I need to power four flight servos (rudder, elevator and two ailerons) in addition to the four tilt servos. Can I do this with a 2000 mah nimh pack connected like another servo to the output rail and if so, I don’t need the zener diode, right? I am thinking it’s probably not a good thing to use one of the ESC’s BEC to power the rail, as everything would ultimately get its source from the lipo. Your opinions are appreciated, especially as I get closer to completion on this.
Adding another battery means adding another point of failure, not redundancy. The lipo is monitored through the power module. You and the FC will know when it is empty and then failsafe kicks in or you decide to land beforehand. How are you going to know what the state of the nimh battery is? Better add a standalone BEC connected to the main lipo, with enough current rating plus a bit headroom to supply all your servos. Test it on the ground by moving all the servos and see if it drops out, before the first flight.
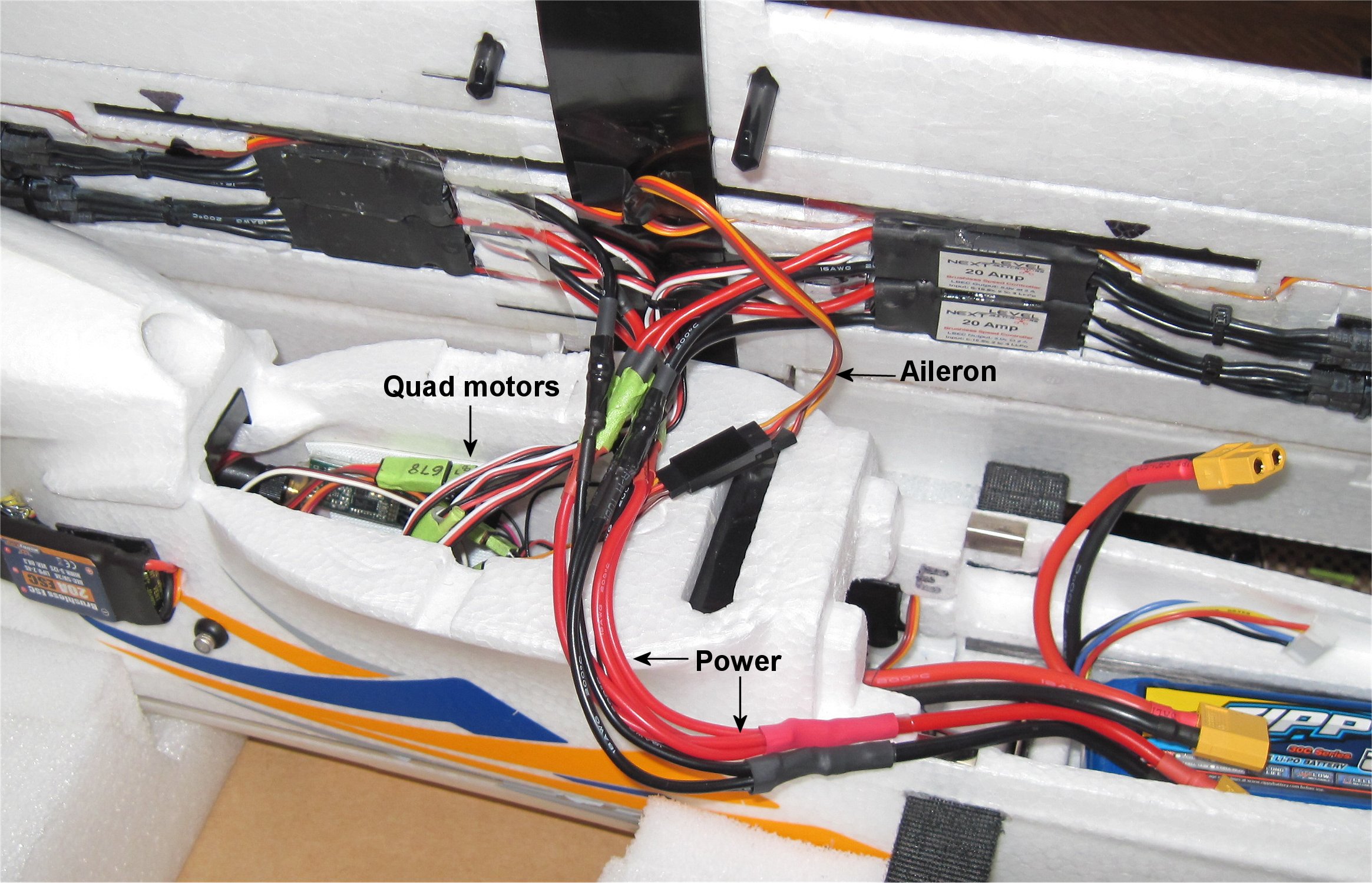
Thank you, Greg. Unfortunately not much room in the fuse as I probably will have to use a 4s lipo inside to get this off the ground. Weight is also a concern at this point. It is close to 5 pounds now loaded. I built a small platform where the canopy goes, and the pixhawk sits on it. (It’s not fully attached to the platform in the video) As you can imagine, the # of wires is considerable. 8 cables [(4) servo/esc cables and (4) 12awg power lines] to each of the carbon fiber assemblies.
Yeah, it was a challenge without adding the extra servo wires for the tilt mechanisms like your setup. However, I sometimes enjoy stuffing 5lbs into a 3lb box.
Thanks for the photos and explanation, Greg. I am nearly ready to hover test. I had to work through some issues regarding the primary (airplane) flight control directions, neutrals, and min/max. I did that by switching from fbwa/qstabilize to manual/stabilize (i.e. airplane) modes (on the bench, of course) and set the centering/servo directions and min/max. Once I felt those settings were valid, I switched the modes back to fbwa/qstabilize/qhover. Here’s my question: Assuming that I have used channels 5-8 correctly (assigned the correct motors and set motor rotations correctly) can I reasonably expect that the pixhawk will make (in hover modes) the appropriate motor speed corrections (fore/aft, left/right, and yaw) based on how the aileron, elevator and rudder settings have been set up?
what do you mean with aileron, elevator and rudder settings in the context of hover modes ?
In hovermodes (QSTABILIZE, QHOVER, QLOITER, QLOITER… ) the “appropriate motor speed corrections” depends on good Q_A_RAT_xxxx PID - parameters (like a copter) and have nothing to do with the rudder settings.
Thank you for your reply, Rolf. I acknowledge that I did not express myself well. What I meant was that I find it difficult to judge whether the appropriate corrections are being made (on the bench) for the four motors. It is easy to tell if the appropriate corrections are being made to the airplane flight controls (aileron/elevator/rudder) by tilting the aircraft (while in stability mode) and watching the corrections made by the pixhawk. What I was hoping is that if I have set the quadplane up correctly as far as the aileron/elevator/rudder is concerned, will the appropriate settings carry over to the motor controls? Or will I have to determine that from hover testing. Doing that is time consuming as I am not using telemetry to make computer corrections.
I think I know what you mean. I have had the plane control surfaces correct only to find that my hover control was reversed. If you follow the Radio Control Calibration in Mission Planner section of the Wiki and then go through the steps to set up your particular QuadPlane you should be ok.
That being said, you can see that the plane control surfaces are correct but what I do on the initial hover is to throttle up so that you are still on the ground but you can rock the plane forward, backward, and side to side using the appropriate stick control. If all seems correct, I then go for the initial hover. Otherwise, reverse the appropriate setting according to the Wiki.
Thanks, Greg. That’s exactly what I meant. We’re going to get (finally) more spring-like weather in the middle US tomorrow. Hope to test hover in a day or so.
Well fellows. I tried a test hover today and there’s just not enough power. Didn’t even get light on its skids. Going to dismantle it and put it away for a while. The next version I’ll do some better planning for weight, motor size, props and the batteries it will all take. Thanks everyone for your advise and support!
It is really hard to see in your video, but are the rear props mounted as pushers? A prop turning with the wrong side up produces far less than half the thrust it normally would. The rear props should be mounted with the numbered side to the motors.
Hello to all. This project seems interesting and I want to add a new question. In the hovering state of the plane the two rear motors are not in the same plane as the front motors are. (if the plane is parallel to fuselage). Will this impact the stability of the plane in hover mode or the flight controller will correct any moment of force by itself? (working on same type of project)
thanks