the Quad is a 500 sized frame with a mini APM running 3.2.1 and when flying in stability mode it is responsive and has no problem holding alt while around half throttle. can ascend kinda quick but is a little under propped. yaws just fine while holding altitude with out throttle adjustments.
If I just let it hover with minimal input it seems fine, My issue is when I enter any non stab mode like alt hold, loiter, or auto it will drop almost like a rock when I give it any yaw input. or if I move forward it slowly starts to drop.
In both cases any throttle input has zero effect except a couple of times I recovered but the throttle reacted in a very delayed manner and once it was recovered it was very unflyable (all over the place just hard to control) until I set it to stab mode, then it became docile again and very controllable.
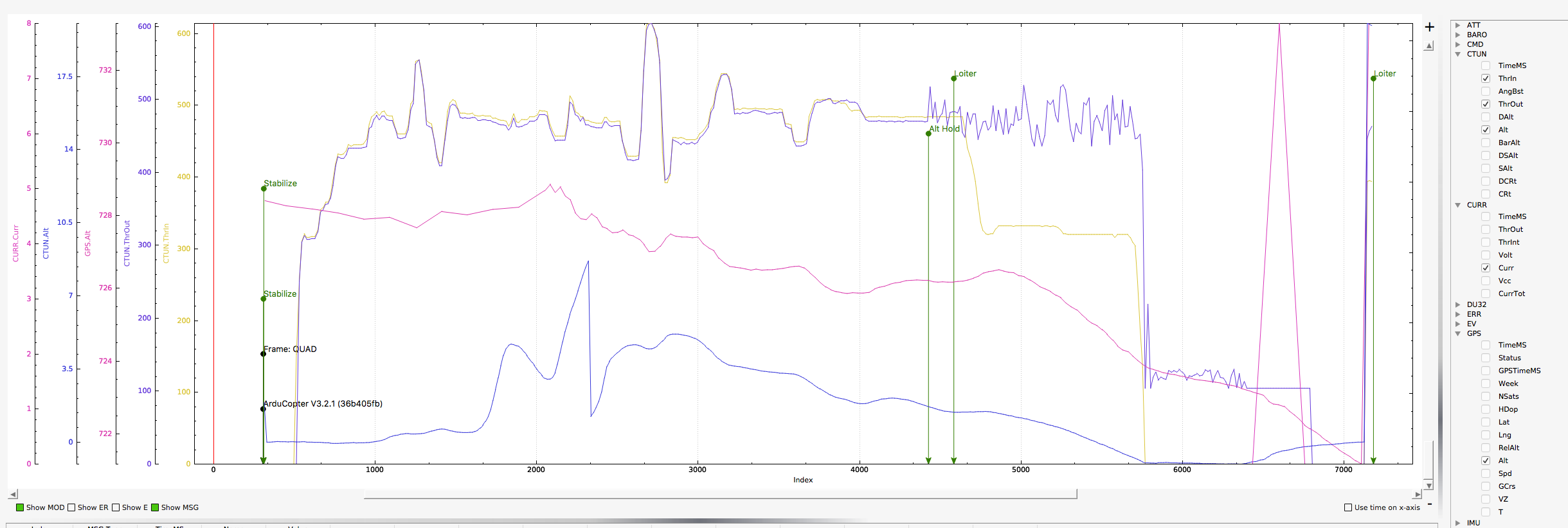
can someone help me puzzle this one out I would saw that I think it is a shot baro but the logs don’t show me what I am expecting for a bad baro (also I may have the entire wrong idea for what to expect for a bad baro since I am new to reading quad logs).
lastly while in a non stab mode on ground when disarming the quad tends to tip over, in stab mode it disarms fine.
Your hover throttle is 1440, well below 1500.
So entering any auto height mode will result in the copter dropping in height.
Have you set throttle hover?
Is your quad balanced, as I can see 2 motors working harder than the other 2.
Your battery? What capacity? I see strange decline in current as the flight progresses.
Your altitude seems to follow your throttle input as expected.
There is a lot of Z vibrations. That will cause all manner of eratic vertical behaviour.
I am still learning the tuning and flying part, This copter was supposedly already tuned.
I have not looked at throttle issues.
Balance was by hand for this flight. (mounted battery and balanced by fingers)
the battery is a 4s 6750 but it was chilly out. and while from initial testing the power module shows it fine, I am unsure about how accurate it is while discharging.
The issue only seemed to happen once I started moving the quad in an auto mode. it can hover just find once I put it in o a mode and I can see it snap to location when I enter loiter mode. just when I yaw it drops super quick, or when I move forward it drops slowly.
I will test the power module, attempt to balance it better, and see about the vibrations?
Any other tips, with the any yaw input it drops (its really crazy, like less then a 1/8 turn and quad starts falling, but in stability I can yaw at full rate and it hovers just fine) could there be some cross talk to some short that causes the baro to go crazy when I yaw?
also I never flew above 10 feet really during that log. I forgot to mention it first post, cause it looks like there are some crazy baro alt spikes.
Do you have foam over the Baro? (spell checker )
When you mentioned spikes in the baro it occurred to me that the baro may be exposed to prop wash or pressure variances when moving.
foam on bars, just to confirm you meant foam covering baro right? it makes sense and no I don’t have it on there. I will add that and give it a try again. Thanks.
 )
)