Hi Redshifft - Have you got a .bin log we can look at. If nothing else I’m interested in seeing the effects you are discussing. Ideally you might be able to supply two or more logs with a range of values.
1 Like
https://mega.nz/folder/2Y4m0RJT#7tb4sWLjWUmcWB1rPHqoCQ
Should be some different settings during testing in above
Just on first inspection I see
ATC_THR_MIX_MAN still at 0.1 instead of 0.5
MOT_HOVER_LEARN,0 any reason not to learn hover thrust?
MOT_BAT_VOLT_MAX , MOT_BAT_VOLT_MIN - these really help with PID scaling as battery voltage changes, but granted probably not as critical with small light craft
Attitude control looks very good.
I’ll keep looking for more over time…
I don’t seem to have that param, Just
ATC_THR_MIX_MAN,0.1
ATC_THR_MIX_MAX,0.5
ATC_THR_MIX_MIN,0.1
I have set AIr mode and switch arming which I am not using ATM for obvious reasons.
I figured it had learned if and it was at 50% stick so I turned it off to not let it interfere with anything.
I don’t much like the Baro raw o/p but shifting the weighting off of it did nothing
Be interesting if you did uncover something in the logs, as I say Alt Hold did work better with those pids in Designed range but I couldn’t leave it pulsing the motors like it was, those "hard minimums " were there for a reason - we need the person who wrote the controller code really ![]()
It’s all definitely in there.
Sorry I did not read everything above. Just a hint.
I have a small copter and that thing did not hover properly (went down to the ground and up) but was flying very good.
No responds to param. value changes in areas I thought it should help. After putting my hardware part - values into eCalc. — the results were all normal but I was given a hint at the bottom that those blades I used, could produce a blade stall. OK I changed the blades to a less pitch and everything is good now.
Except for my own health reason I am not flying at the moment.
Good post thanks ![]()
Doubt Quad props would stall with the pitch we use but it tells me you have desensitized the machine to something the control loops are happier with.
Not an option for me due to the limited range of 4" props.
Hope your health gets better soon, If you get a chance to post your params to compare we may find something interesting, Thanks
ATC_THR_MIX_MAN,0.1 Is the same for a couple of other Quads we checked,
ATC_THR_MIX_MAX, higher on heavier 7" quad 0.9
Sorry, unsure why I couldn’t see what I typed - suspect the doc search didn’t like the full name as I searched for it directly ![]()
Use the Full Parameter Tree in MissionPlanner if possible
ATC_THR_MIX_MAN,0.1 is for testing in case there’s a danger of fly-away. ATC_THR_MIX_MAN,0.5 is normal once initial test flights are done.
ATC_THR_MIX_MAX is usually 0.5 too unless you’ve got a special reason to change it.
I’d really like to see a log with MOT_HOVER_LEARN,2 (learn and save) and see if that changes the position holding ability, or at least what performance is like whether good or bad.
And these too:
ATC_RAT_PIT_FLTD,45
ATC_RAT_PIT_FLTE,0
ATC_RAT_PIT_FLTT,45
ATC_RAT_RLL_FLTD,45
ATC_RAT_RLL_FLTE,0
ATC_RAT_RLL_FLTT,45
ATC_RAT_YAW_FLTD,0
ATC_RAT_YAW_FLTE,2
ATC_RAT_YAW_FLTT,45
INS_ACCEL_FILTER,20
INS_GYRO_FILTER,90
MOT_THST_EXPO,0.52
How is that related to PSC_ACCZ_FLTD FUNCTION?
1 Like
A small 250 quad has been one of my primary development copters for years. I have had alt hold working very well on everything from 150g to 150kg.
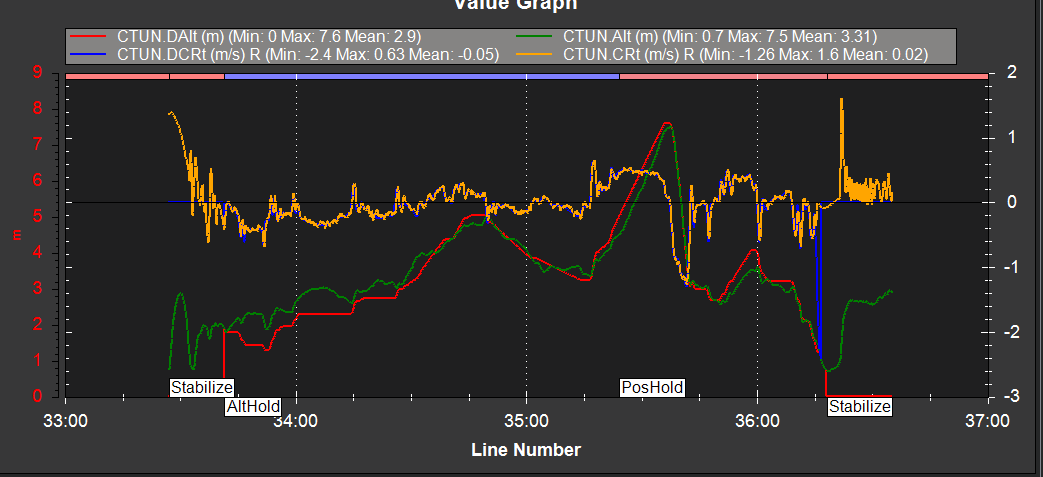
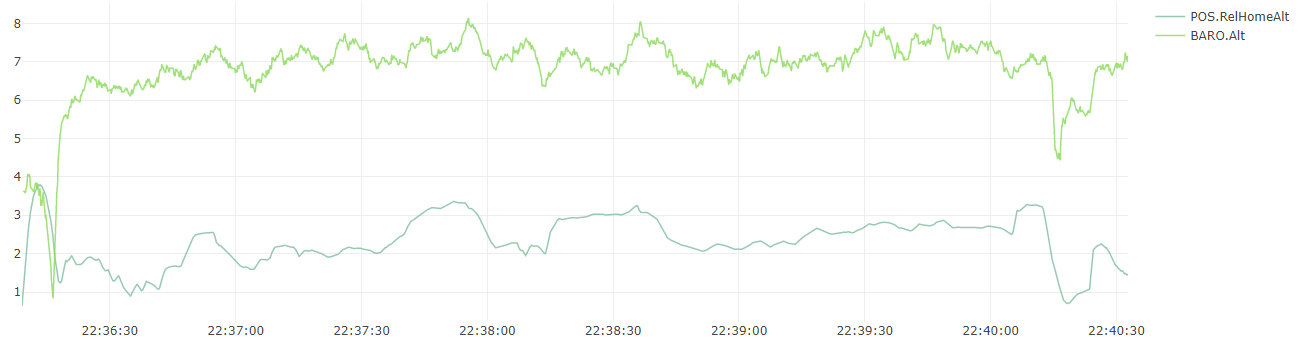
Very inconsistent climb rates vs altitude. For example at one point your altitude is not changing but your altitude rate is -0.5m/s.
Your GPS vertical altitude rate does not match your climb rate.
So this is not an Alt_Hold tuning problem it is an estimation problem. Maybe you have a crappy gps that is not giving good height data.
You could try EK2_GPS_TYPE 1 so it doesn’t use gps vertical velocity.
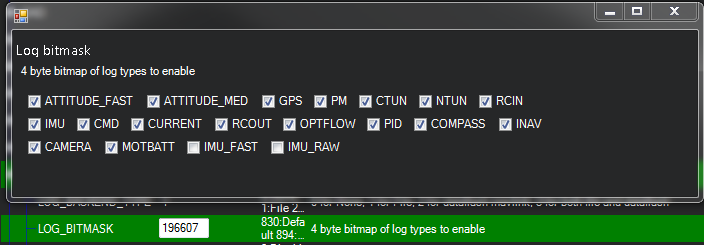
There is also signs that there is noise we are not seeing. A log with fast logging turned on might show something:
In any case, you have good vertical velocity control it is just your vertical velocity isn’t matching the change in height. That tells us this is some sort of sensor problem.
If it ever stops raining I will try that, Thanks ![]()
Yes I can test that - I can barely get a 3d fix in the back garden where I do some testing. Interesting you say that, the Baro seems to jump around and the left scale jumps about in the HUD (Mission Planner), apparently until you have a good GPS fix, which I can’t get at home.
But Again I come back to the fact that besides the motor pulsing everything worked better with PSC_ACC_P&I at higher values ( I need to log that)
I will change the logging also , Thanks ![]()
I would like to see your little 150g quad, I have enough trouble @240g
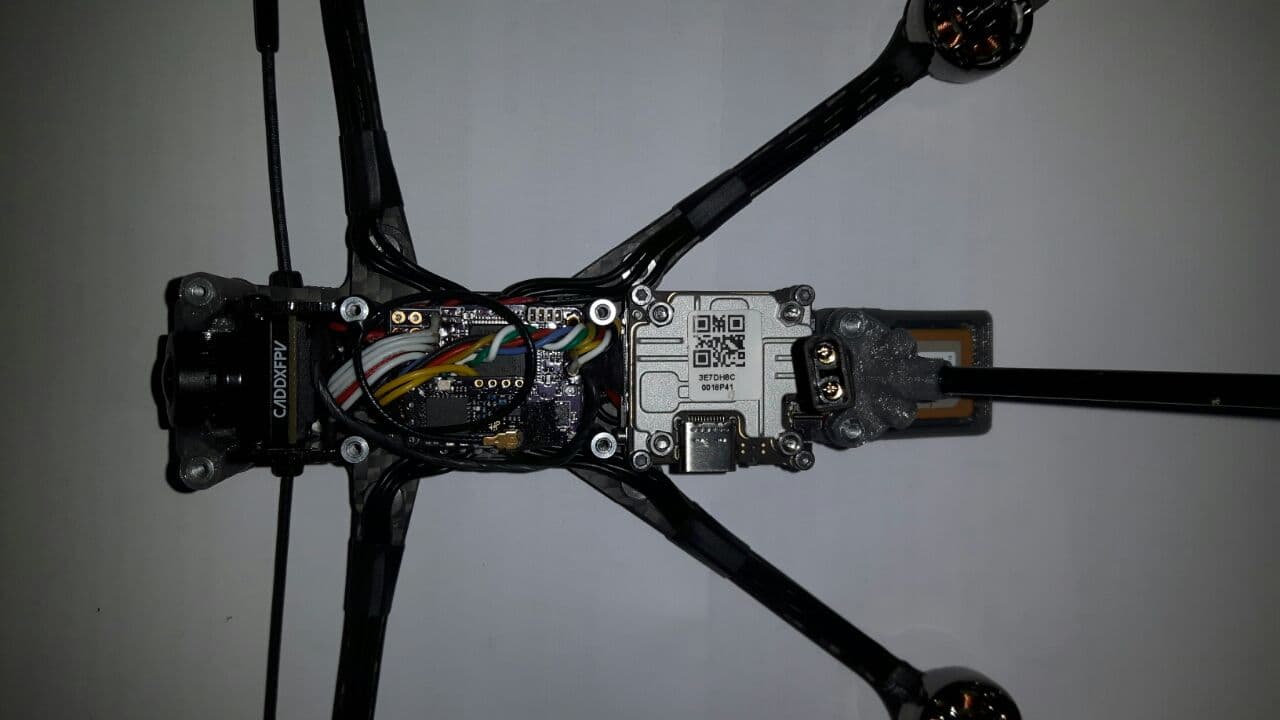
Digital video signal could be the cause of your bad GPS fix, for me (and for others in this forum) split cams have this negative effect (EMI in frequencies near those used by GPS).
You could try to power off all video stuff to see if GPS fix get better.
1 Like
It sure is ![]() I have done some screening since that picture but GPS reception is always bad even with full size GPS antennas in my garden.
I have done some screening since that picture but GPS reception is always bad even with full size GPS antennas in my garden.
https://mega.nz/folder/2Y4m0RJT#7tb4sWLjWUmcWB1rPHqoCQ
Your settings 00000085.LH SETTINGS.BIN
It made no difference, which did not surprise me as the problem is in ALT HOLD which you would hope does not rely on GPS so much.
Figures crossed You can see something with the fast logging !
Thanks
Your setting …00000086.XFACTA.BIN
Horrible to try to hold ALT with the learning on and worse response to Throttle.
Initially I thought It may be better but it’s just the same really, but you Hopefully got some data to look into
Thanks.
00000087.PSC_PI RAISED.BIN was with just the PSC p&i raised (to Quad motors pulsing in height hold) It got gusty and started to rain so not the best log, I could tell straight away, it’s not much better though
We have some other APM Quads to test in the week - might learn something
I might be able to check out more later, but it looks like a combination of two things that are probably quite common on small quads.
- “ground effect” / prop wash over baro, especially while landed and motors get armed, Baro Alt jumps up to 4m
- poor GPS reception while on the ground
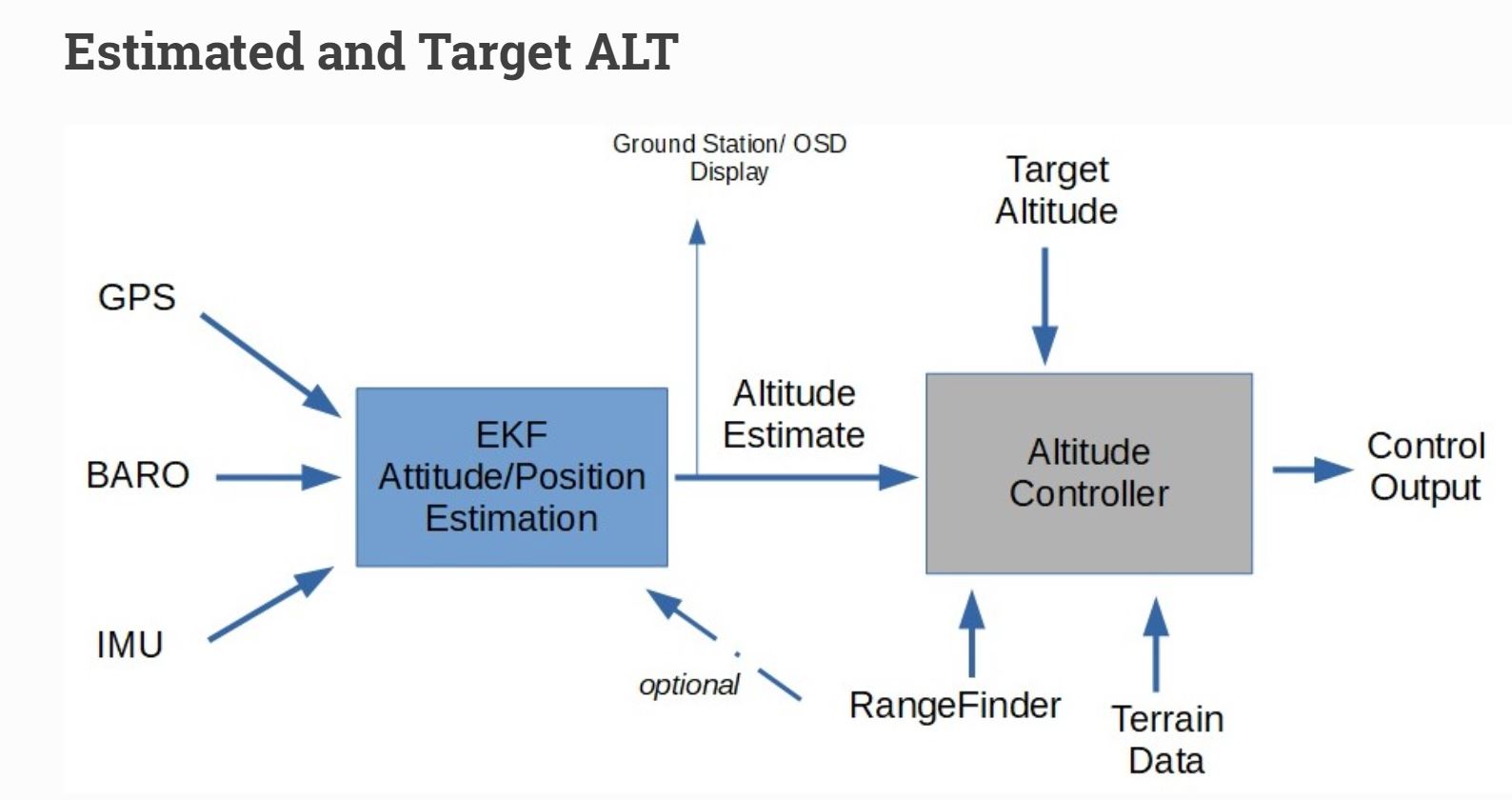
And from then on Baro Alt and GPS Alt stay separated potentially confusing the the EKF - Leonard may be able to comment more on this.
Next it would be interesting to see arming and flight from on a wooden or plastic slat table (with gaps between the slats) where prop wash and GPS reception won’t be as much of an issue.
I put “ground effect” in quotes because I don’t mean ground effect in the traditional effect, nor is the baro uncovered (I suspect) - but a problem with the quad being so close to the ground and the prop wash circulating back around through the props again -> creating an unusually low pressure zone.
That’s my vague explanation - happy for anyone to correct me or fill in the technical terms.
As I said early on it holds Altitude better when just flying on the ACC maybe the fix is as simple as increasing the ACC weighting for the small stuff.