Ah, ok ![]()
@Leonardthall sorry, respect to my post above with two plot relative to two baros, I would like to have, if possible, a comment on this:
I had a quick look at your log and a picture is below.
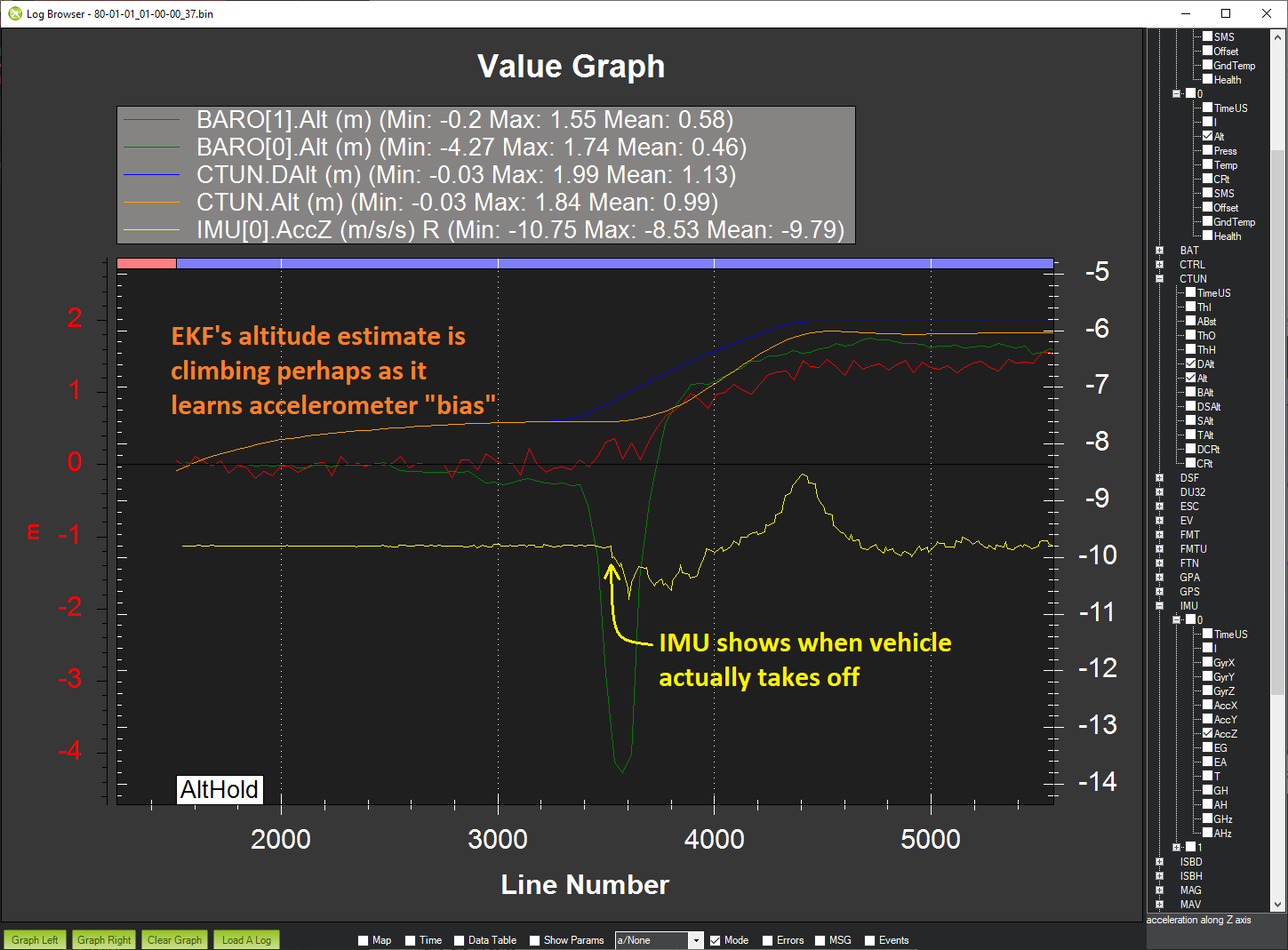
The EKF altitude is a blend of barometer and accelerometer so the EKF altitude estimate is often different from the barometer. In this log we see the EKF altitude estimate is climbing from zero after arming but before takeoff, this is probably because the EKF is still learning the accelerometer bias which can change over time and also depending upon the temperature of the IMU.
Another reason the EKF estimate is different from the barometer is the barometer has a relatively long lag (about 0.2 seconds) and is quite noisy so the EKF’s estimate is first based on the accelerometers and then the baro altitude more gently pulls the estimate in one direction or another.
Hope that helps.
1 Like
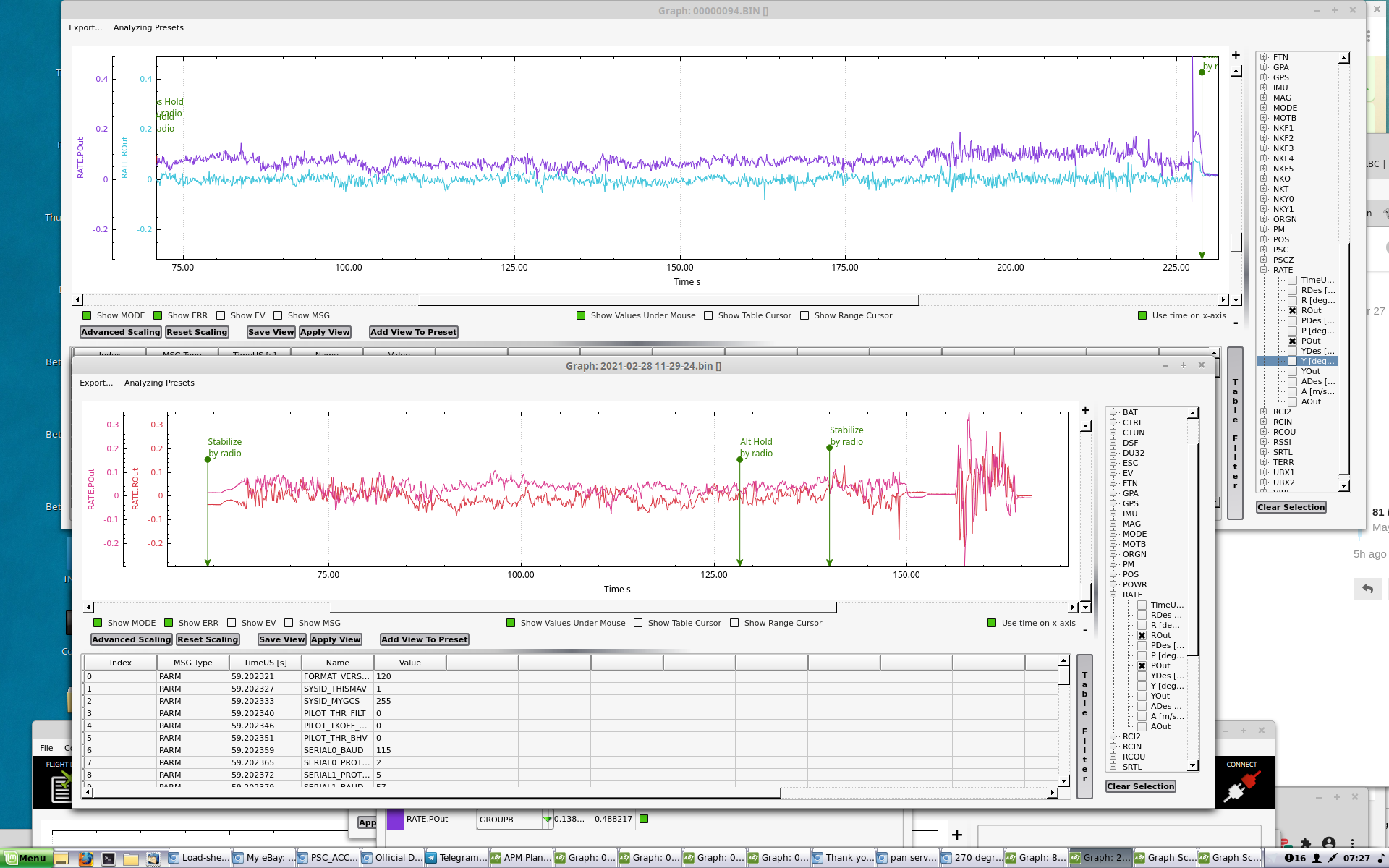
Thanks @rmackay9 I understood your explanation. Do you think that this could explain also the fact that EKF alt estimate, desired alt and baro alt become close only after a while and only after this I have a stable AltHold? I attach a plot to visualize this.
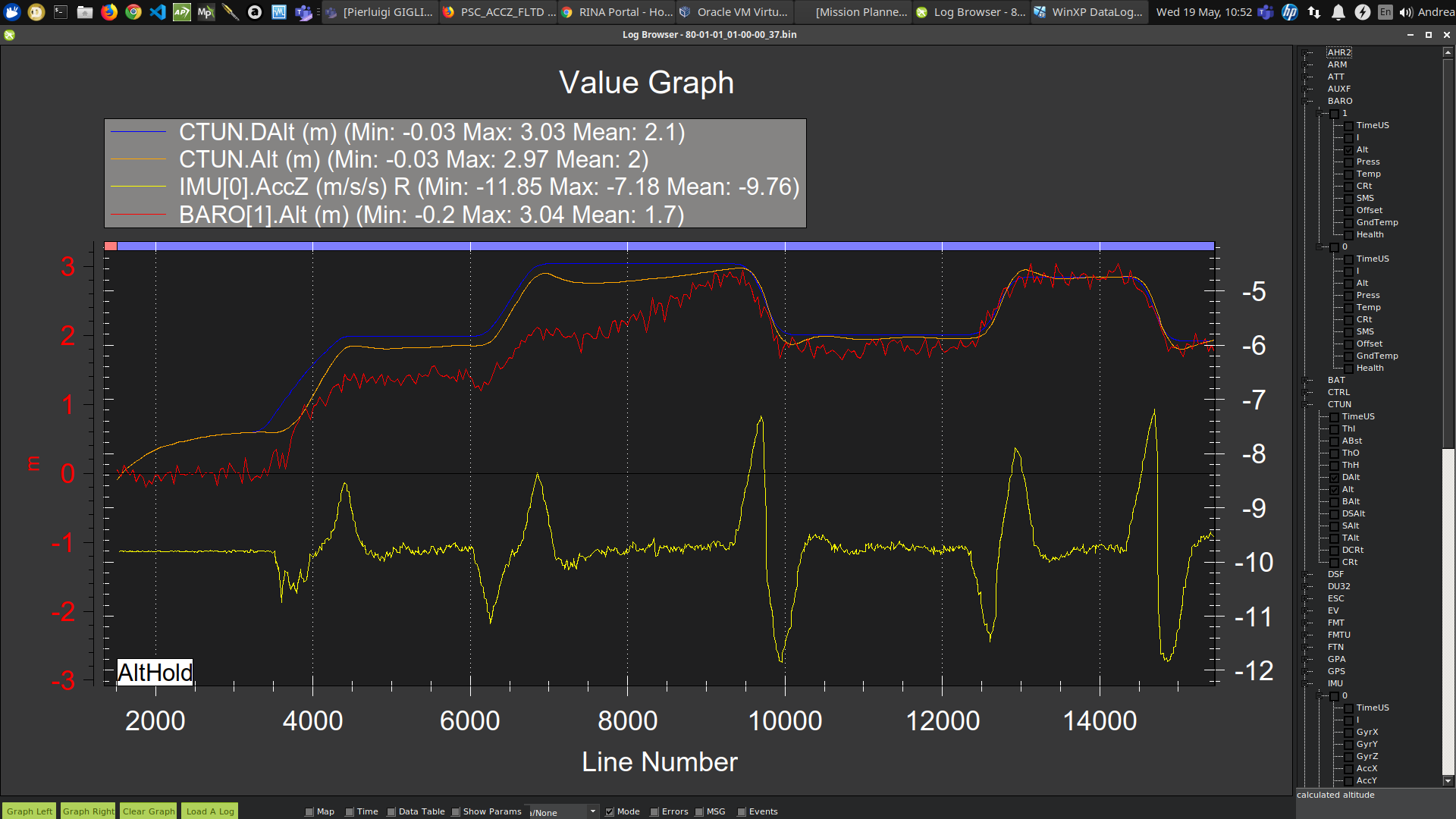
With other Copter I built I don’t have this “problem” and I have stable AltHold right after takeoff.
1 Like
Logs, 89 and 92 should have fast logging, maybe you can see something?
Thanks

Yes, it takes some time for EKF’s altitude estimate to stabilize so this is what you’re seeing. If it was just sitting on the ground a little longer before takeoff then I think they would be together right from the start of the log.
It’s a guess but you could try re-doing the accelerometer calibration but I suspect it is mostly the IMU temperature that is the issue.
1 Like
Thanks, I have the same feelings.
The MatekH743 Mini becomes very hot when is powered on and not armed, then when in flight the temperature drops a lot.
I did the IMU temperature calibration and this helped but didn’t completely fix it.
1 Like
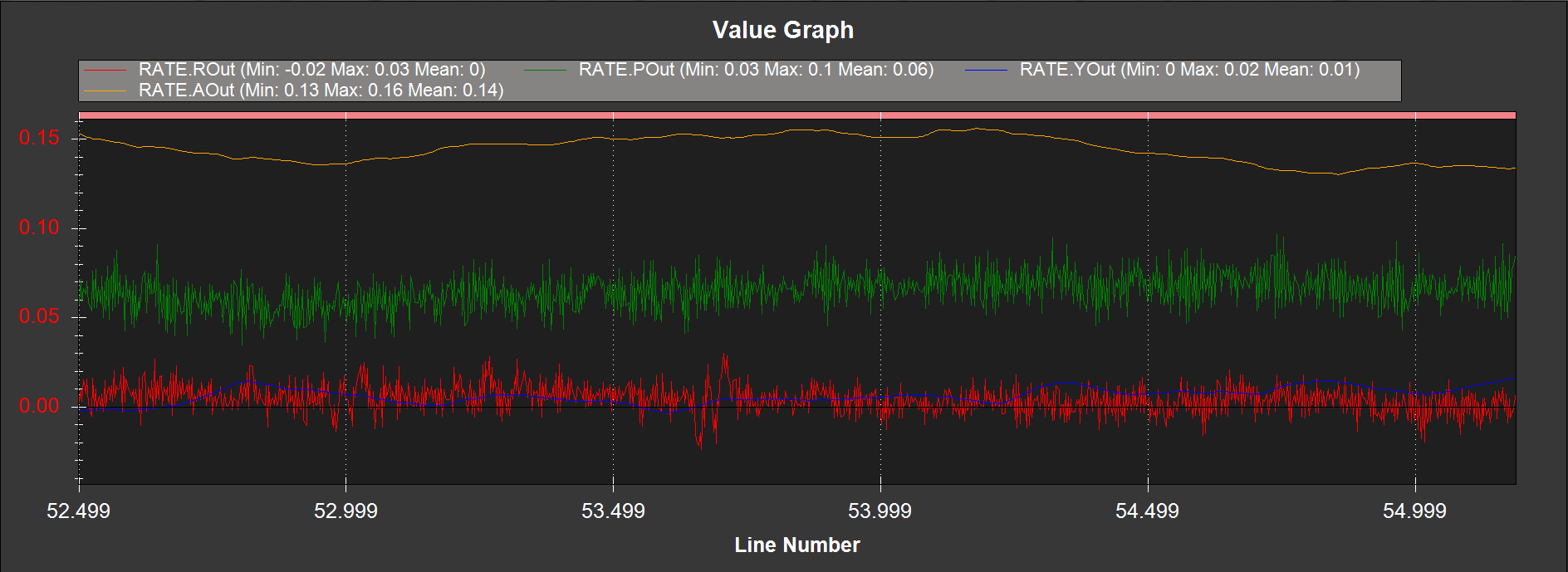
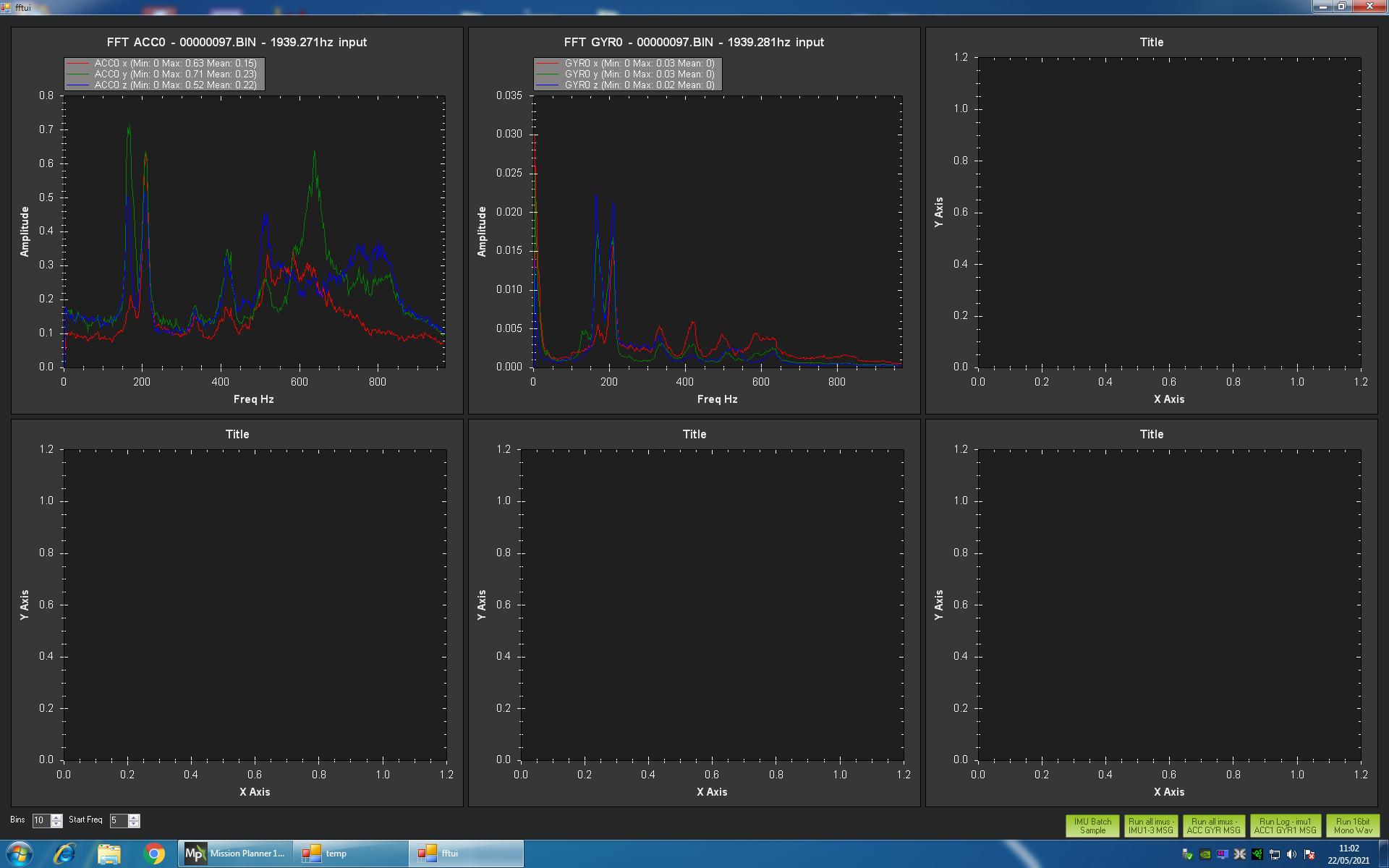
No noise on your throttle but it looks like you have some significant high frequency noise so you may be suffering from aliasing messing things up. We have seen this sort of problem in other aircraft with high frequency noise sources.
@Leonardthall Interesting, It’s not the best IMU (9250) but is that really excessive?
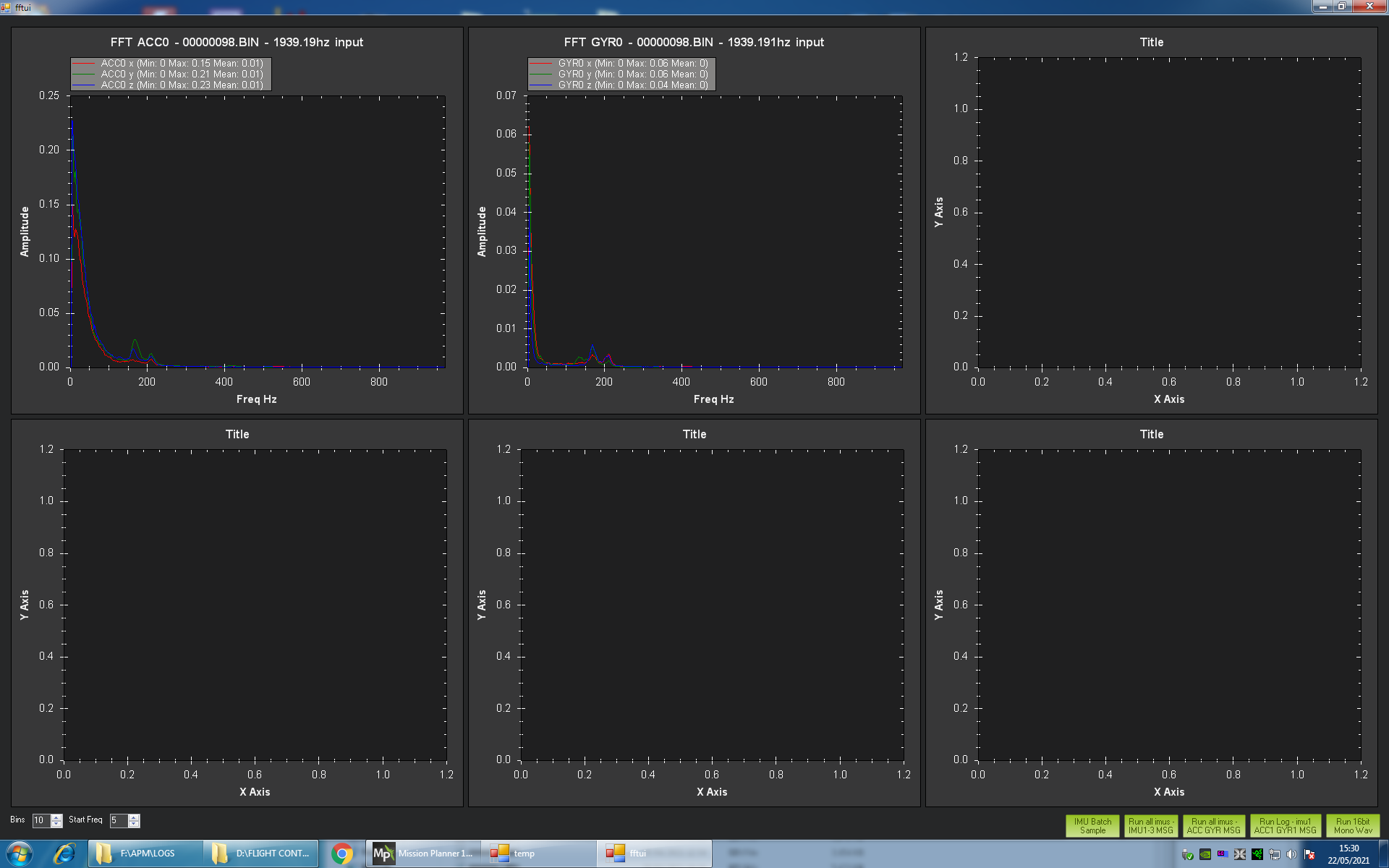
Below is another Quad without issue (bottom graph) and it does not look much different.
Is there a Spectral analyser for Arducopter like Betaflight Black box viewer has?

Not quite sure what your point is?
My point is I don’t see much noise on the IMU do you?
Aliasing is where the noise is near the sample rate and it looks like an offset near zero Hz rather than high frequency noise. The only way you can see it is to increase your sample rate and logging rate. So you may try increasing your sample rate.
The effect is similar to the bias problem that Randy was talking about. I would chase down Randy’s suggestion by looking at temperature compensation. (I think that is in there now but I am not sure)
I see nothing strange other than a weak ALT hold performance really and I have that much better now.
I’ll know more when I test these other Quads whether I’m just expecting too much and I’ll feedback my findings.
Thanks
Has there ever been a solution to the initial altitude drift? I have the same issue with the DPS310 baro. Extreme drifting in the beginning and then a stabilization and after some time the drifting begins again.
It could be high frequency noise which amplifies the issue but it is also happening on the desk away from noise sources and it does not happen using the MEAS MS5611 barometer with Ardcuopter 4.0.7.