- Sure, because it’s producing no thrust. Test the motors on the bench w/o props with Mission Planners Motor Test only. Change the motor direction in BLHelisuite.
- Yes and disable Low RPM Power Protect.
- No need, leave it enabled.
1 Like
Thank you for your help!
I did a stable hover in atl hold and even loiter modes, despite pretty strong wind.
Logs: https://drive.google.com/file/d/1VFREQpr1jBlCQfpTqQb-g56dlw0WHm0K/view?usp=share_link
Can you please advise me next steps?
I was thinking about:
- create and print a “canopy” over pixhawk, which will fix all wires.
- remove the camera gimbal and run autotune
- try to fly with payload and camera gimbal.
OK, looking good. Make these changes:
INS_HNTCH_ENABLE,1 (then refresh the parameters)
INS_HNTCH_ATT,40
INS_HNTCH_BW,26
INS_HNTCH_FM_RAT,1
INS_HNTCH_FREQ,52
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,3
INS_HNTCH_OPTS,0
INS_HNTCH_REF,1
make another hover flight so we can see how well the filter is doing.
- Yes, remove them for Auto Tune
- Sure after a review of the post filter results.
If Auto Tune fails with a “fail to level, manual tune” message then the Rate PID’s will need to be reduced a bit.
Dont use the canopy to secure wiring. The wiring should be secured without the canopy, and not touching or pulling on the flight controller.
The canopy will protect the flight controller from prop wash. Wiring should not touch the canopy either.
1 Like
Applied filter and did hover, mostly in loiter mode, because of wind here
Logs: https://drive.google.com/file/d/1lV8LD8TXQJfWeHwosjSnYsL97nuIthmn/view?usp=drivesdk
I also tried autotune, finished only roll and crashed ![]()
I defenetly need to find place with more room and less wind
Logs:
https://drive.google.com/file/d/1maeWDek_o-YDdZCm-sV7gzCadpEVJc03/view?usp=drivesdk
And can you please explain, what you check in logs, so I will no bother you next time?
The Notch filter is working well. You use the FFT graph in Mission Planner to check that.
You can’t run Auto Tune if there is ANY wind to speak of.
This would require writing the tuning Wiki over again; it’s not so easy to summarize in a post here.
1 Like
Thank you, guys!
I was proceeding with the tuning(I even started to see a difference), but during the landing, a branch stopped one of the motors and burned ESC. So I have a couple of questions for the next build.
Is it expected behavior, that when something blocks the motor from spinning, ESC burns?
I already ordered two stacks with 4in1 ESC, because I found it hard to work with pixhawk wiring and it will also save some space. After purchase, I realized that one stack has BlHeli_S firmware instead of BlHeli32, is it ok? I saw in the wiki, that I would be able to track same telemetry, so filters should work.
Should I apply the same filter parameters?
Depends on the ESC and how much short duration current it can provide whether it will smoke or not.
You will need to flash the Blheli_S ESC with Bluejay firmware to take advantage of it. Or return it.
Hi again!
I could finally apply a new flight controller(Skystars H7 HD) with new ESCs.
I really struggled with compass calibration, it seems to be calibrated nowб but when I do calibration from QGC quality is red. The compass is the same - M9N module from the previous setup.
This is the first hover without Notch Filters: https://drive.google.com/file/d/1e-_uut40pZ4esgZJpH6L38dXsu4tjV1Y/view?usp=share_link
I should apply the same parameters from above, but maybe change INS_HNTCH_FREQ to 51, right?
Now that you have done an initial Compass calibration use Magfit for a final calibration.
Try these:
INS_HNTCH_ATT,40
INS_HNTCH_BW,26
INS_HNTCH_ENABLE,1
INS_HNTCH_FM_RAT,1
INS_HNTCH_FREQ,52
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,3
INS_HNTCH_OPTS,2
INS_HNTCH_REF,1
Looking pretty good for a pre-tuned craft.
Applied, now in FFT I see that overall noise is lower, but there is still one peak at ~240Hz, I guess it is alright.
https://drive.google.com/file/d/1kJ2gIl3sHM5Rxq3TbO0kg9ekepfHEzcv/view?usp=share_link
But I also tried to collect logs for Magfit, did different yaw, pitch, and roll inputs when I suddenly copter crashed, without any message. I only see that pitch got high, while the desired pitch was around zero.
https://drive.google.com/file/d/1E7ZWr8mePKdZHvvXHfnBAlLEcZ6jNOpa/view?usp=share_link
Right, no significance the magnitude is very low. The filter is working very well (FTN data in the log).
This is puzzling. For some reason the Flight Controller dropped the Throttle output well before you dropped the throttle (RCin3) but I don’t see why.
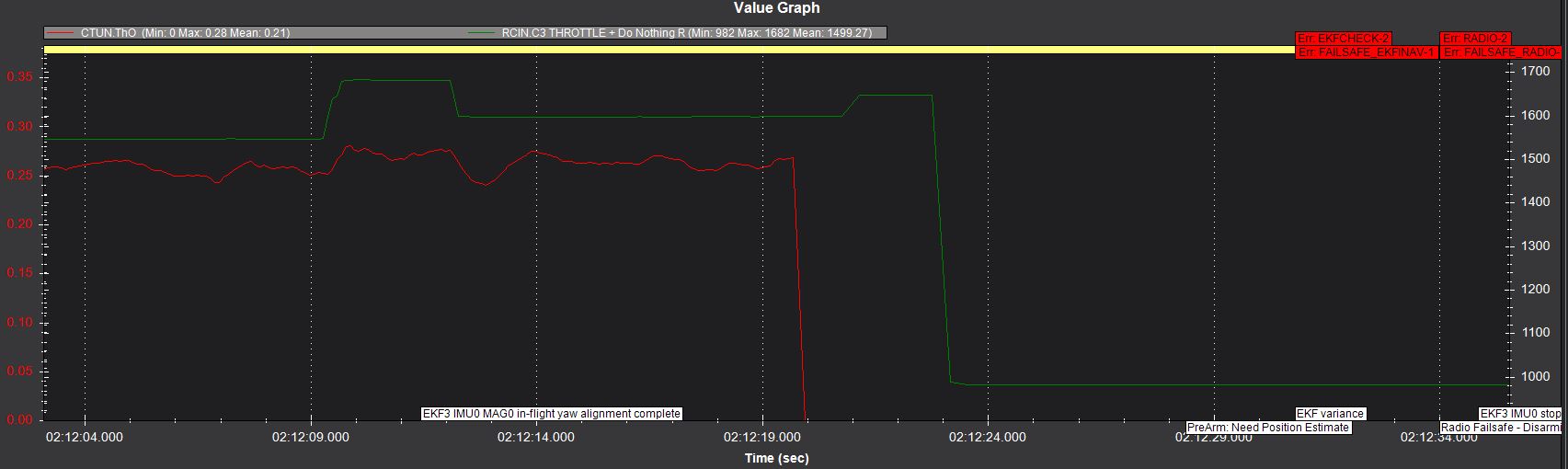
Thank you!
I dropped the throttle after the drone fell, the altitude was pretty low so it was on the ground in just a second. I saw from the logs, that ThO dropped when I changed Yaw’s direction. Also, I had a feeling that the yaw is very inert and needed tuning. Could this be root cause?