Hi there!
I am trying to build a new quadcopter with next hardware:
Pixhawk 2.4.8
Frame - ZD680
Motos - Sunnysky x4110s 340kv
ESC - Readytosky 40A
Props - Tarot, folding, 15 inch
When I tried my first fly(without any initial tuning) on a 6s big battery it was very “nervous” and did twitch every couple of seconds finally after a few tries one motor “lost” thrust and the copter crashed.
I did some initial tuning, moved gps/compass further from battery and did one more flight, but this time
I took 4s battery by mistake. The flights were good, stabilize/alt hold/loiter worked fine, had just one twitch and found later in logs “Ground Mag Anomaly” message just when twich happened.
So I was pretty sure that everything will work fine and I can switch to autotune, but with 6s battery.
I also moved the compass 5cm higher, because of that error, but now I had just the same issues on 6s as before. On every mode: stabilize/alt hold/loiter. Also, it produces some strange sounds, like something is preventing the motors to move.
Oh, forgot one more difference. On 4s flight, I added a big capacitor where the battery connects to PBD. In 6s flight, I didn’t use it, because I didn’t have a place for it and also because I had two capacitors on every ESC.
The craft has insufficient thrust/weight on 4S for proper flight stability so either lose some weight or use 6S. Which exact ESC’s do you have? You have Dhot600 set but I don’t know as I have seen 6S Dshot capable ESC’s from that low quality supplier.
Old technology and they don’t support Dshot so set MOT_PWM_TYPE back to default (0) for PWM. And these:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
PSC_ACCZ_I,0.50
PSC_ACCZ_P,0.25
And try to make a simple Hover in AltHold for a minute or so and post that log. You are not ready to run Auto Tune w/o setting the Dynamic Notch Filter.
You likely have to lower the Rate PID’s also but try the hover 1st.
Doesn’t much matter they would both be set to PWM. Get yourself some BLHeli_32 ESC’s as the best option.
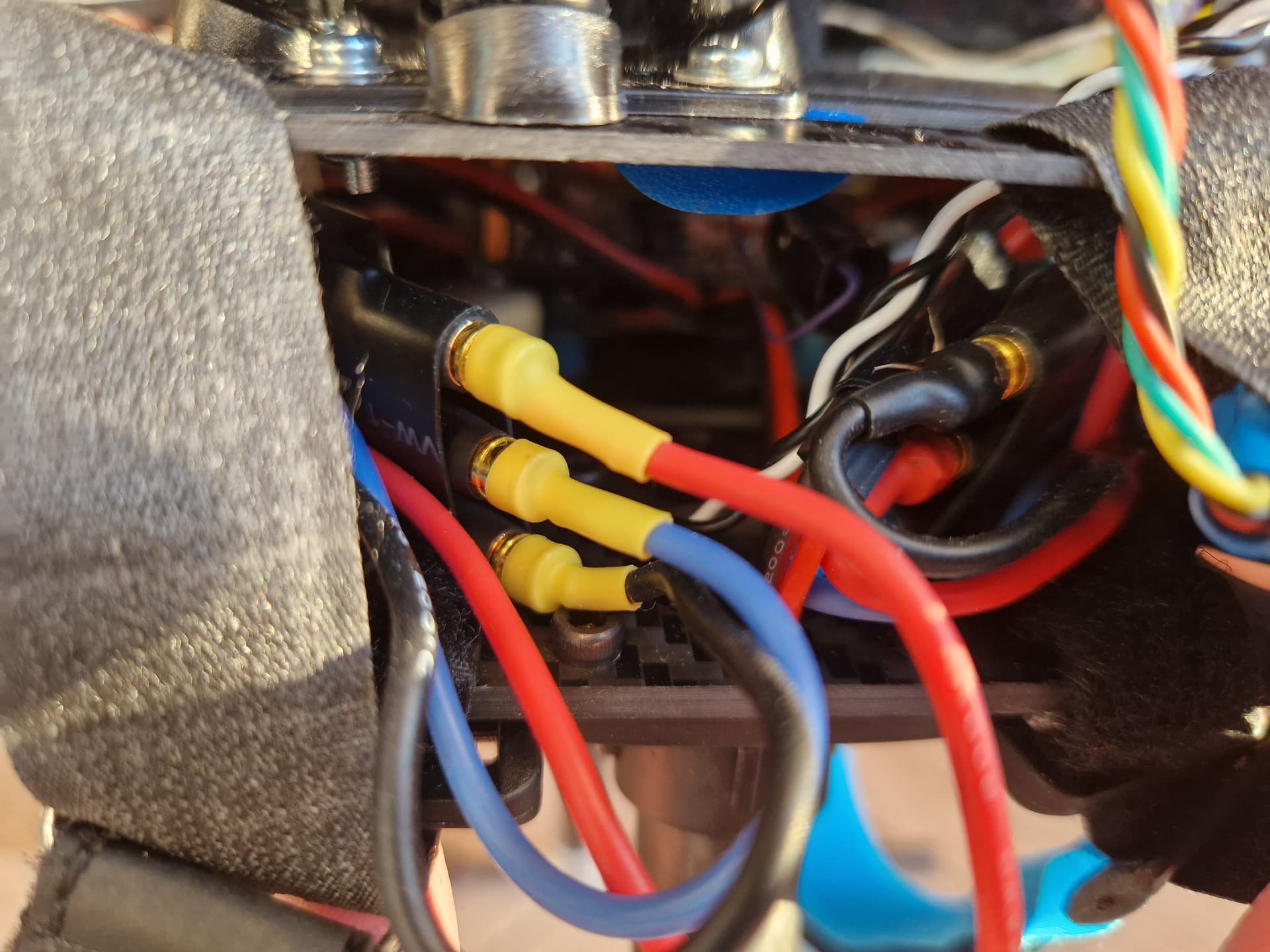
In this case you had thrust loss on Motor 3, Motor 4 dropped to compensate and down it goes. Perhaps you have some bad hardware or bad connections. Let’s see a photo of this craft.
Tidy up all the wiring too, it will all need to be secured but not pulling tight on the flight controller or rubbing against it. Stiff wires like the GPS cable especially.
It’s amazing how much the wiring can amplify vibrations or cause more vibrations in the prop wash.
Remove that big stiff USB cable, find the correct connector that plugs into the small USB socket on the top of the flight controller, with normal skinny wires, and extend that out to a remote USB socket.
Is that a second battery?? Or maybe a small one just for testing…
Just for the record, it’s a bad idea to set up a second battery to power separate items on a small multirotor - it’s just adding complexity, weight and more points of failure. Best to power everything from the main flight battery and size it accordingly.
USB cable was removed, and I used it only to calibrate the compass outdoor.
This is only one, main battery. Keep it at the top to leave space for payload at the bottom.
I will try to handle the wiring, thank you!
I burned one ESC because of a short circuit after my soldering
Will change them to Emax ones and will to hovering again.
For that copter get a good well known 4in1 BLHELI32 ESC.
I’ve used the Holybro 45A 4in1 and the 65A Metal 4in1 with success.
Many people have success with some other well known brands.
This simplifies wiring and you can use DSHOT600 with at least RPM data, if not more data like temperature and voltage.
The RPM data drives the Harmonic Notch Filter.
We can help you with the required BLHELI settings and everything else, you wont regret it.