I had a hard crash with my hexacopter a couple of days ago (one of the motors went off the frame on the fly and made it extremely hard to control or land) and it started to go crazy off the horizon! I had to search a large area around, but with the help of some friends and locals I found it but I couldn’t get the complete flight log. The log file looks fine but it seems it stopped logging variables a little while after the flight.
Can somebody address me on how to prevent this to happen ever again?
Is this some kinda software issue in Arducopter firmware? I’m using Arducopter 4.0.7 on Pixhawk 2.4.8
I don’t want to lose any data and I want them to be fully recorded from the moment of takeoff to landing. I always check my flight logs in plot.ardupilot.org
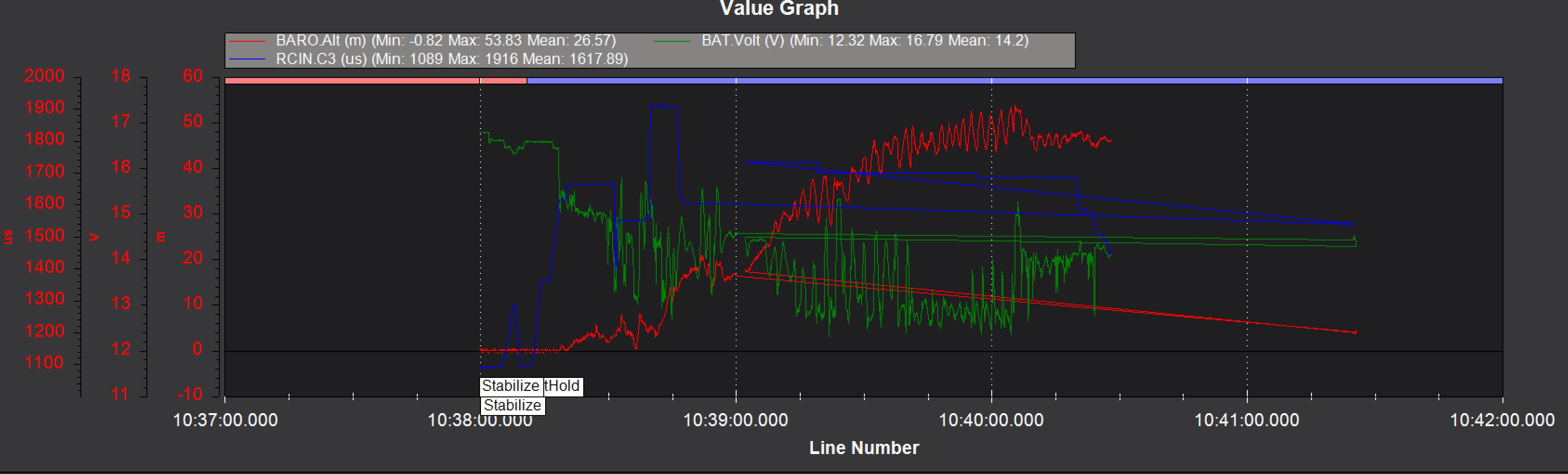
Motor 1 seemed to disappear and it was commanded to max output, motor 2 commanded to minimum to compensate - as you are aware.
Even before the motor departed, the attitude control is not ideal. I think better tuning could have helped with stability even in this case.
The log is definitely a bit strange though, with some deviation half way through.
Better to use the .bin logs too, there’s more info.
thanks for the reply. there’s no need to say that the pixhawk stopped logging after 1:38 and it didn’t even last until disarming. the aircraft kept going east for about 1.5 km and then crashed and it didn’t even record that. I was hoping that I could find the exact location of the drone. anyhow, is there anything to do before the flight to avoid such failures? the log history even was cleared before that flight.
there’s no need to open the black box after a successful flight
Alright. I’ll try with another SD card.
Does this problem have anything to do with the extreme shocks and vibrations of the drone mid-flight?
Although, Pixhawk was installed on its special holder standing on silicon dampers. Maybe I should hardly fix the flight controller mainboard inside of its box to dampening very hard shocks or use some kind of silicon glue on the SD card holder?
I changed the SD card to another one. Cleaned the SD card slot. Made a good cover to not let the dust get into. Seems it solved the problem so far, except for very rare crashes and hard landings which makes sense. Maybe some glue is necessary to hold it tight in place. I do not see any problem here anymore. maybe some fellow developer considers adding the reinitializing the SD card on the fly in case of a sudden vibration.