Hello, I’m on the first video, I added RLL_P, and on the second video PIT_P. Today there was a breeze, and on the second video there was a big PIT_P and had to be planted, since the control was not stable.
Misha,
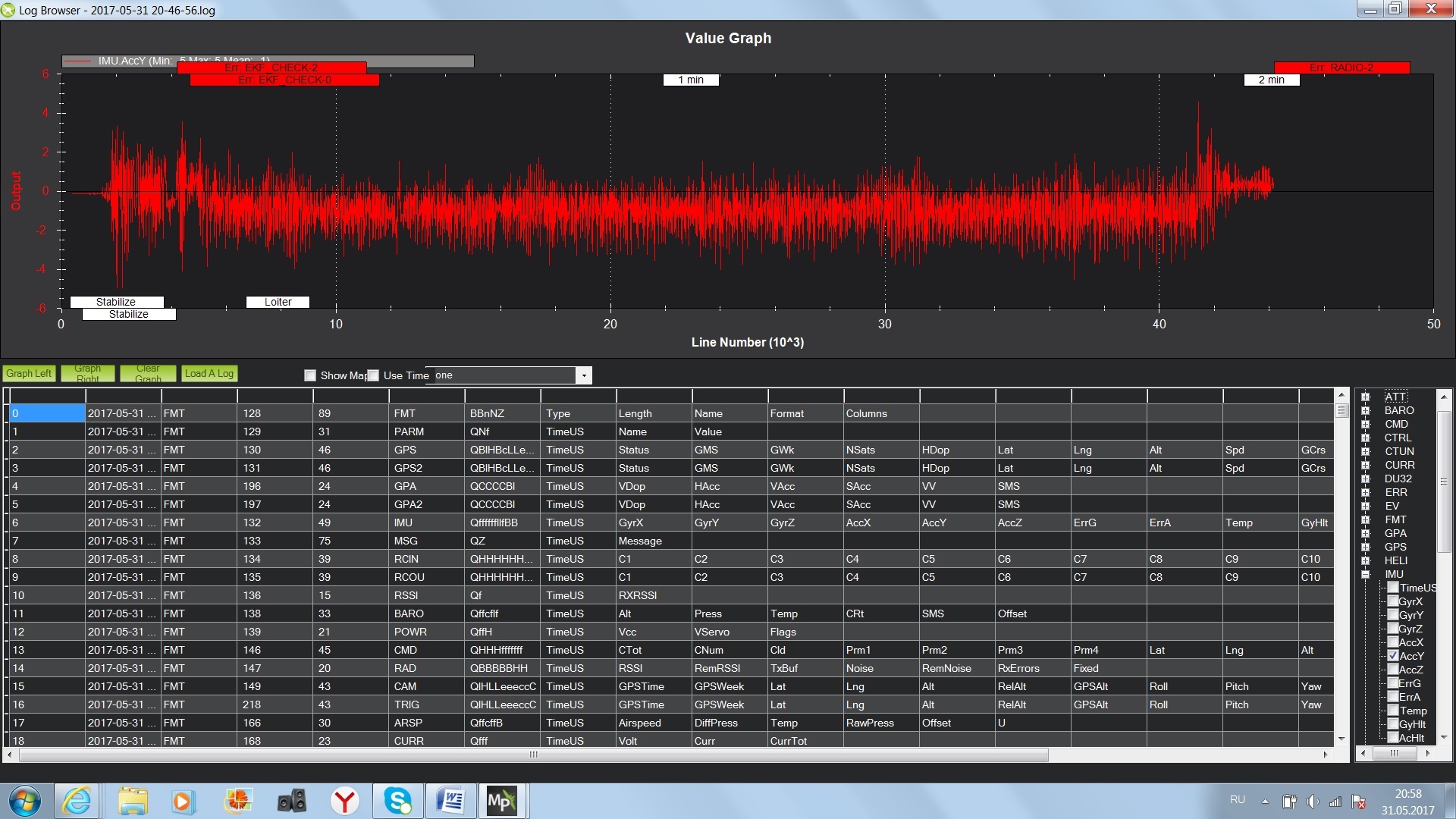
I looked at your logs. I see your strong oscillations in pitch and roll are at a frequency of approximately 5hz. So the low pass filter (FILT=4) is helping but you won’t be able to raise it any more unless you try to change your set up to try to reduce the vibrations causing this response. Or is a notch filter to try to stop the bad frequency from getting through.
As far as the drifting in loiter, you can try increasing you I gain and see if it gets better.
thanks for answers
My helicopter T-Rex 500 PRO with a shaft on the tail, and gives a vibration. It will, of course, be better if there was a belt on the tail)
I most likely will not be able to remove more mechanical vibrations, many vibrations are transmitted through the wires.
I did not understand you, the notch filter, how to call this parameter in the settings menu?
How is this parameter called in the settings menu? Please write details)
True. And even the location of the pixhawk and the structure it is attached to will be a factor.
I was just saying that a notch filter could be used to filter out just that frequency and allow you to potentially get better P gains. There is no notch filter in the current software.
I continue to configure my 500.
Has achieved no bad results, gusty wind 3-4 balls hanging well.
But there are problems:
- I do not know why I have such a shift of vibrations down the Y axis, what should I do?
- sometimes the tail shakes.
- when going down, in LOITER mode, there are strong fluctuations, what are the recommendations, help, please
31.05.2017г…param (10.9 KB)
2017-05-31 20-46-56.bin (1.6 MB)
Misha,
If you plot Y accel from IMU1 and IMU2 together, you will see that they do not lie on each other. I believe this is some sort of aliasing and could cause some issues with the EKF which can be bad if it looses the attitude solution. Hopefully @Rob_Lefebvre can look at this and give you suggestions on what to do.
As for your tail shakes, there appears to be some oscillations in the D term of the PID. I wonder if that might be it. Try lowering the D gain and see if that helps.
As for the strong fluctuations in Loiter, what kind of fluctuations, Altitude, attitude??
For example, if the helicopter is lifted upwards 20-30 meters, then quickly descends in LOITER mode, then when going down, in LOITER mode, there are strong fluctuations along the RLL axis, what are the recommendations, help, please.
Misha,
After looking at your logs again, I would suggest that you set the ATC_RAT_RLL_ILMI and ATC_RAT_PIT_ILMI to 0.10. That should help with the error between actual and desired pitch and roll attitudes.
Hopefully in a few days I’ll have some other suggestions for you. Waiting to see some more test results.
Bill Geyer Today spent a Test, and ATC_RAT_RLL_ILMI ATC_RAT_PIT_ILMI increased to 0.10
Vrode cost you a little better, but the problem is not entered in descent down the regimes loiter EST fluctuations, fluctuations when the wind is stronger ò glasses and what Dals me do? More can add ATC_RAT_RLL_ILMI and ATC_RAT_PIT_ILMI ???
2017-06-04.param (10.9 KB)
2017-06-04 .bin (1.6 MB)
Misha,
Here is what I suggest.
Reduce ATC_RAT_RLL_P until the oscillations stop. I would think that 0.10 might be low enough to stop the oscillations.
If you feel that the aircraft response is not quick enough to your inputs then you can increase ATC_RAT_PIT_VFF for the pitch axis and ATC_RAT_RLL_VFF for the roll axis.
Next I would recommend increasing the ATC_RAT_PIT_I and ATC_RAT_RLL_I in 0.05 increments up to no more than 0.35 to help with the attitude hold.
Hopefully with these changes, it will help your aircraft fly better.
Bill спасибо, убавил, ATC_RAT_RLL_P до 0.10 стало горазда луче, но есть еще проблемы. Я провожу испытания и эксперименты с ATC_RAT_PIT_VFF, ATC_RAT_RLL_VFF и ATC_RAT_PIT_I, ATC_RAT_RLL_I у меня мало времени для испытаний, у меня идет настройка медленно.
Bill у меня к вам есть просьба, вложите пожалуйста ваш файл param с вашими настройками, мне очень интересно его посмотреть, какие у вас настройки. Спасибо.