Hi,
I am testing, in simulation, precision landing with fiducial using a companion computer.
It works great except that the descent is uneven, as you can see on the video
landing video
I have set LAND_SPEED and WPNAV_SPEED_DN parameters as specified in the doc here : Land Mode — Copter documentation (ardupilot.org)
are there any other parameters to set?
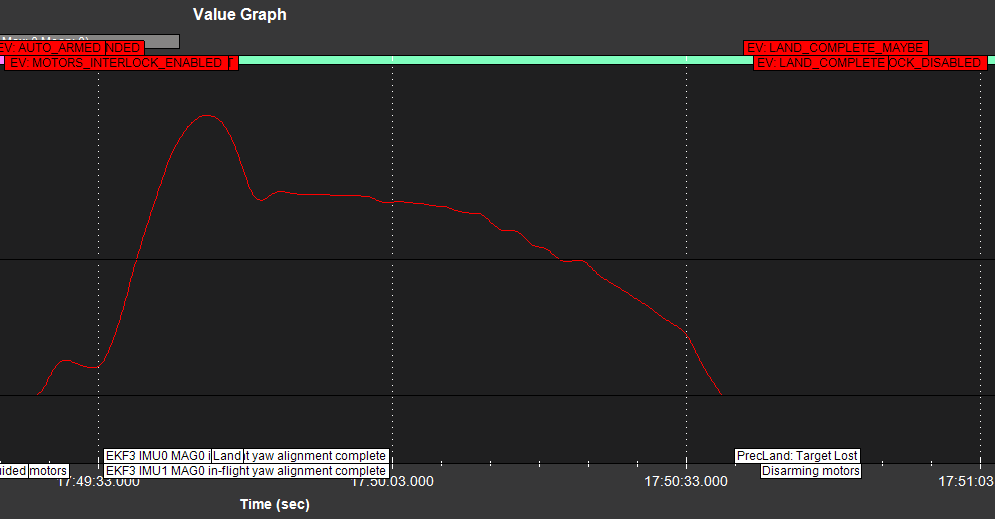
how would you analyze the flight to understand the wobble during the landing phase ?
log file https://drive.google.com/file/d/1_wU3a8BpdiFYXLjmNH0RZflacRylgjAm/view?usp=sharing