HilHr
April 30, 2020, 9:33am
1
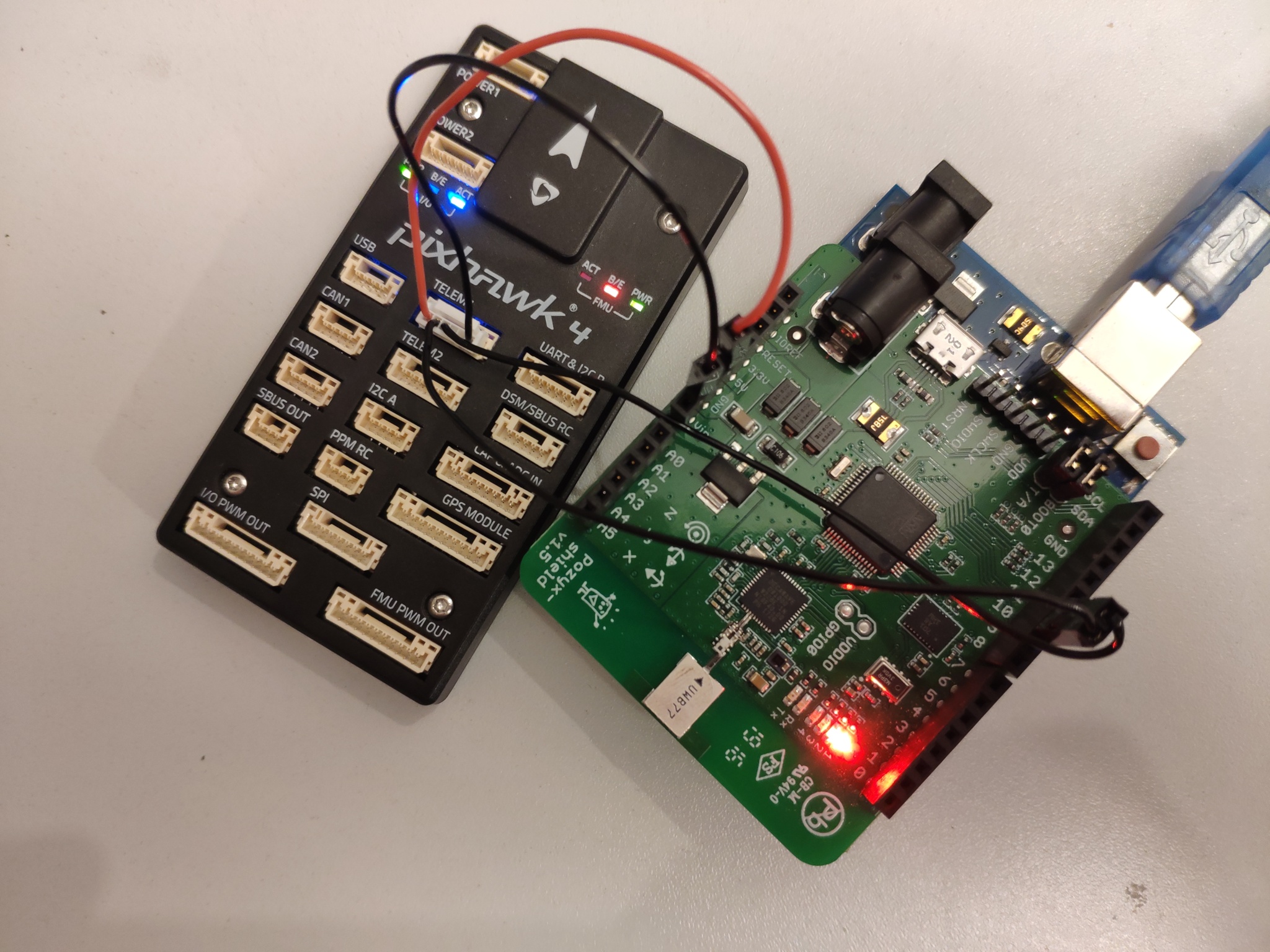
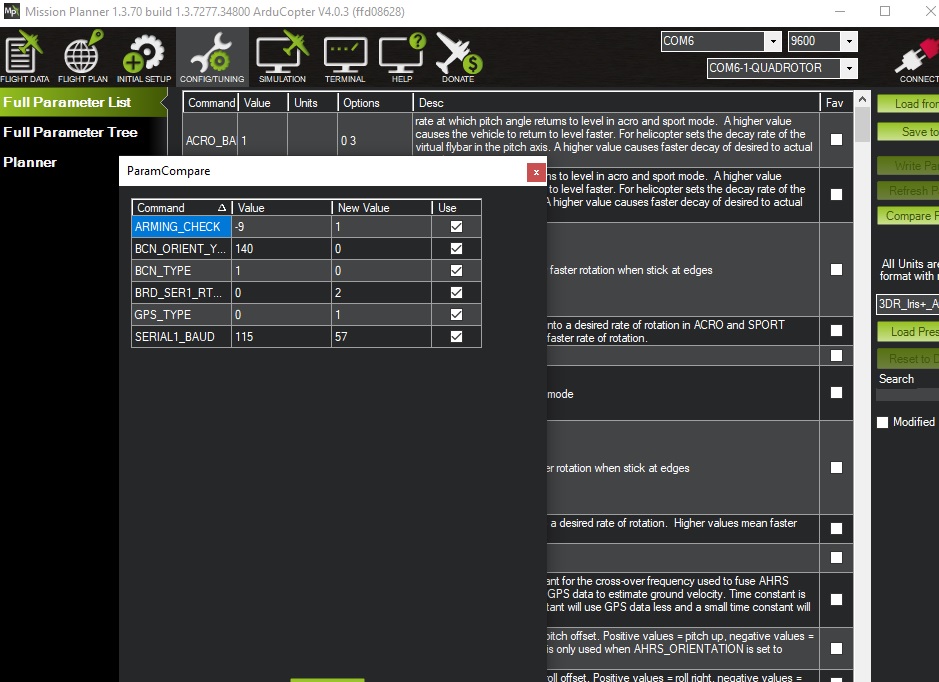
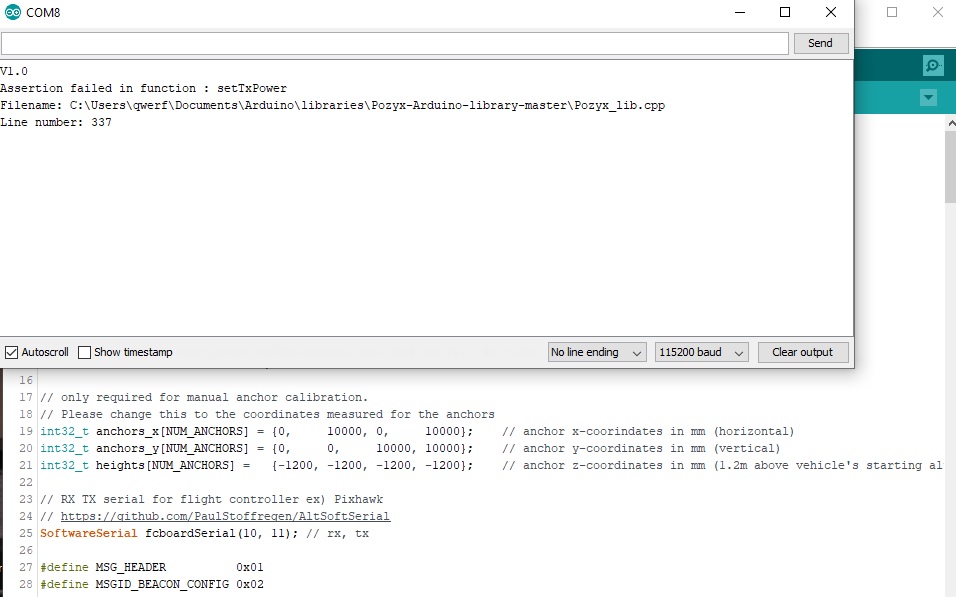
I use ArduCopter v4.0.3 in mission Planner, CU is Holybro pixhawk 4, everything is connected to Arduino UNO R3 and configured as instructed but unfortunately I get an error all the time:
V1.0
What a mistake I’m making, Please help.
Arduino sketch:pozyx_drone_mission_planner.zip (3.6 KB)
ppoirier
April 30, 2020, 9:41am
2
Hello
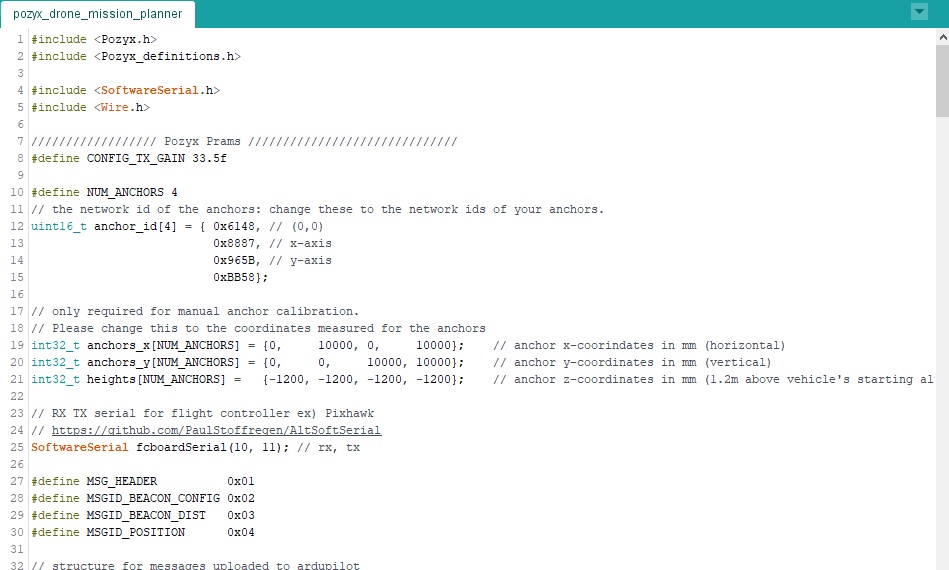
Looking at code , you have to change these lines with your tags I’d
#include <Pozyx.h>
#include <Pozyx_definitions.h>
#include <SoftwareSerial.h>
#include <Wire.h>
////////////////// Pozyx Prams //////////////////////////////
#define CONFIG_TX_GAIN 33.5f
#define NUM_ANCHORS 4
// the network id of the anchors: change these to the network ids of your anchors.
uint16_t anchor_id[4] = { 0x601C, // (0,0)
0x6020, // x-axis
0x6057, // y-axis
0x605E};
// only required for manual anchor calibration.
// Please change this to the coordinates measured for the anchors
int32_t anchors_x[NUM_ANCHORS] = {0, 10000, 0, 10000}; // anchor x-coorindates in mm (horizontal)
int32_t anchors_y[NUM_ANCHORS] = {0, 0, 10000, 10000}; // anchor y-coordinates in mm (vertical)
int32_t heights[NUM_ANCHORS] = {-1200, -1200, -1200, -1200}; // anchor z-coordinates in mm (1.2m above vehicle's starting altitude)
HilHr
April 30, 2020, 4:04pm
3
Hello , thank you for help
I did change it:
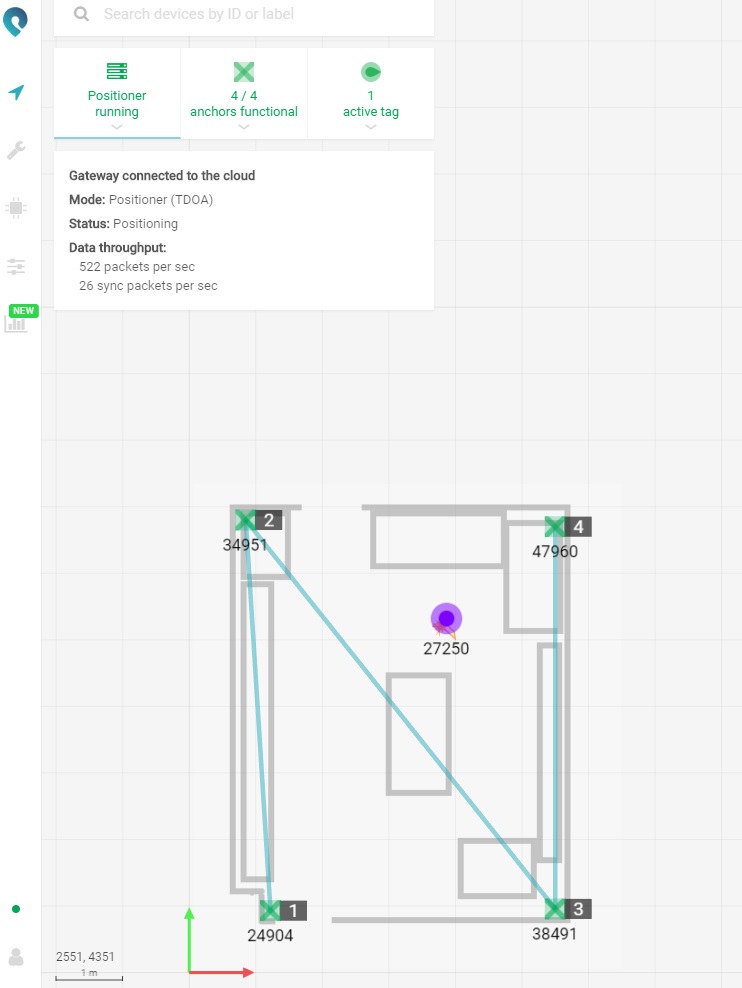
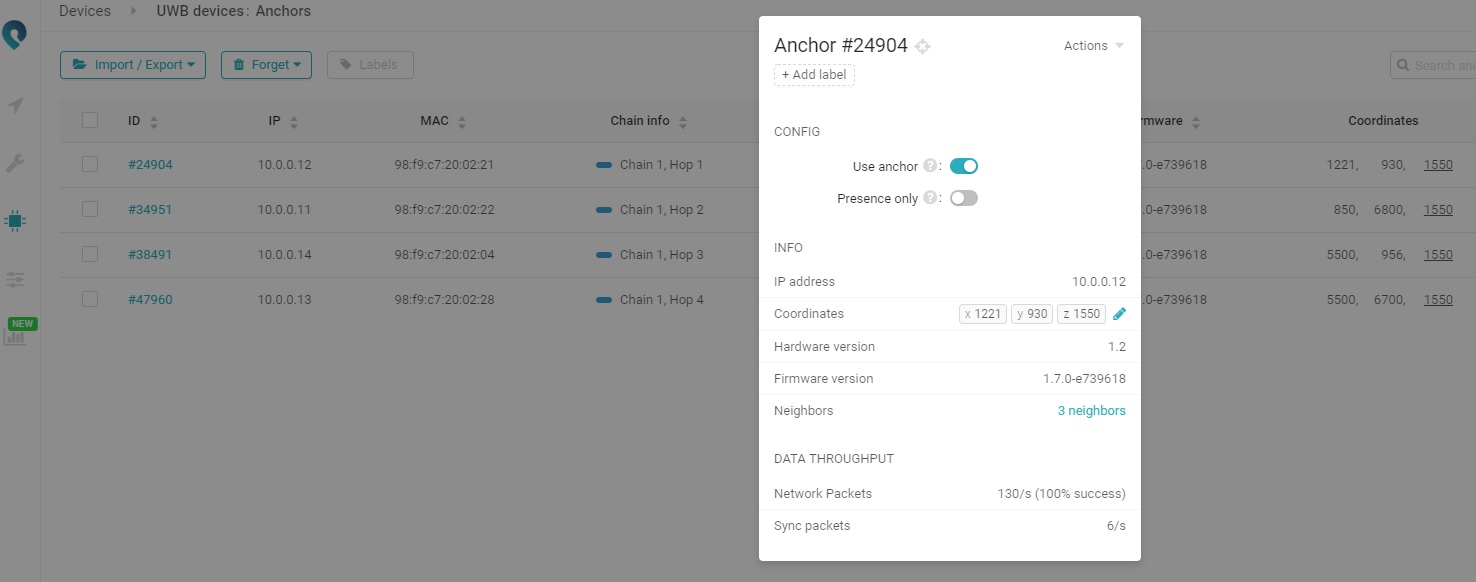
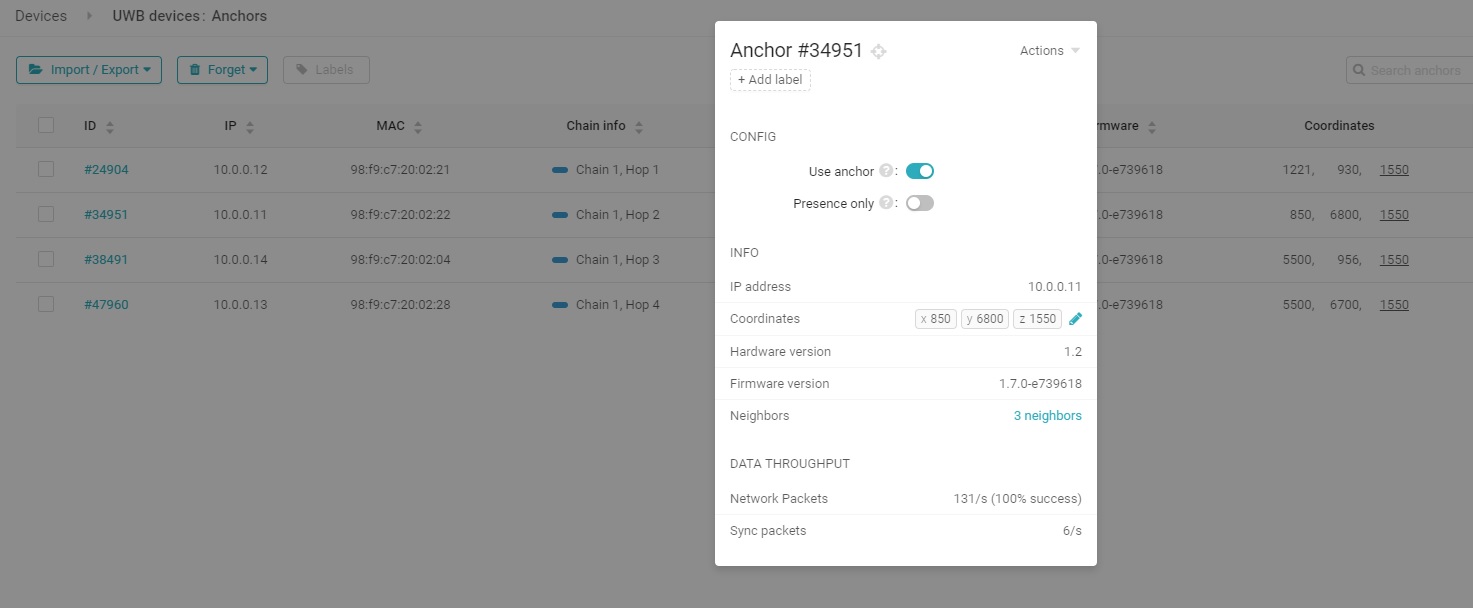
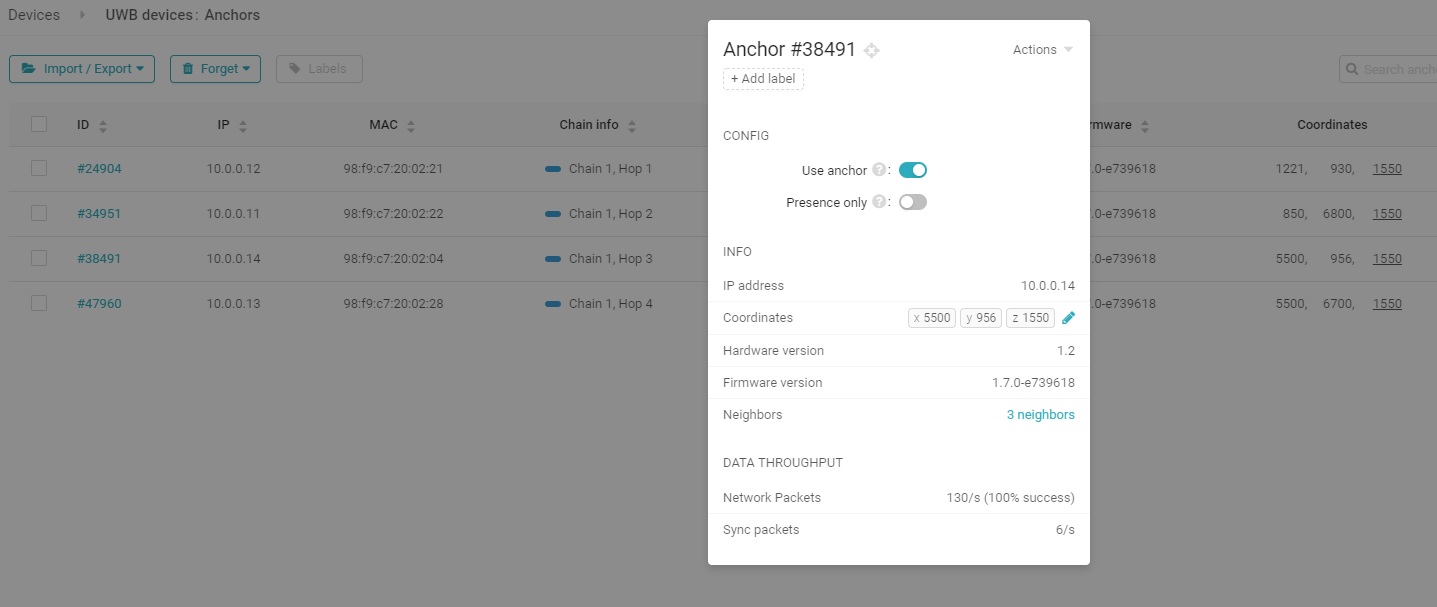
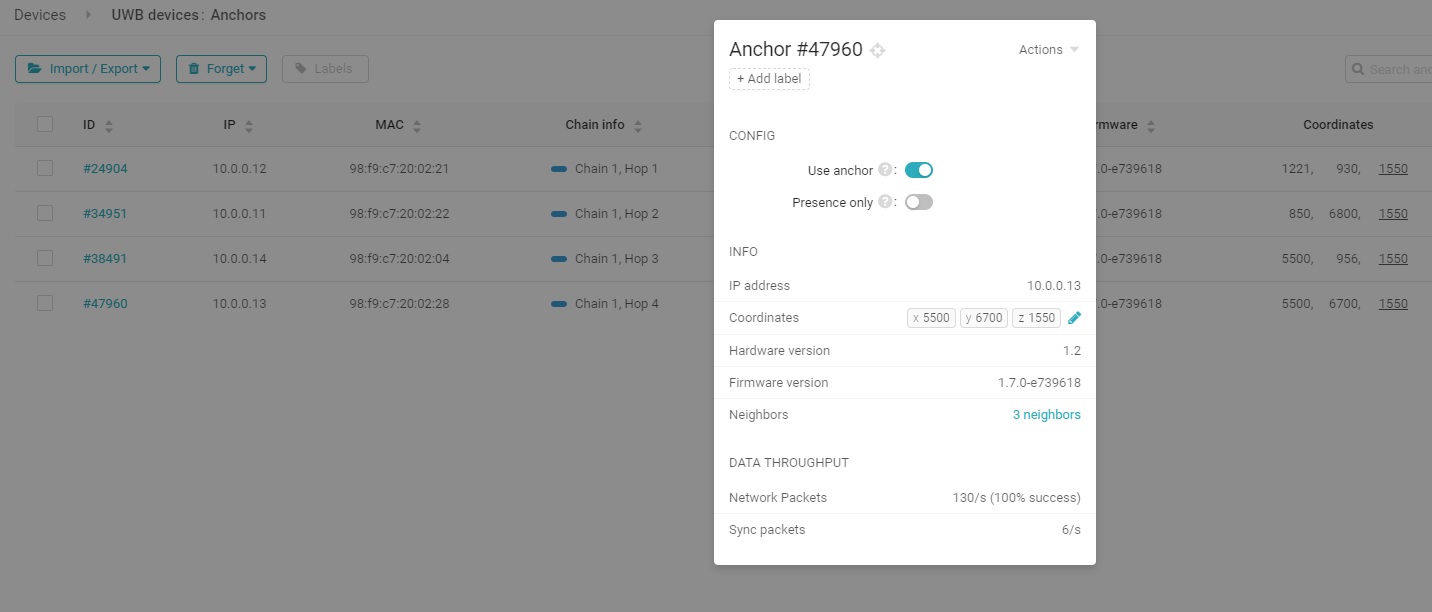
anchors id is 24904 what is 0x6148 hex
anchors id is 34951 what is 0x8887 hex
anchors id is 38491 what is 0x965B hex
anchors id is 47960 what is 0xBB58 hex
I just rewrote the anchor decimal numbers and convert them to hex.
Thank you
ppoirier
April 30, 2020, 10:27pm
4
Looks Good, Unfortunately I dont have these, maybe @rmackay9 could help you.
HilHr
May 1, 2020, 12:26am
5
I contacted @ rmackay9 but haven’t received a response yet.
I think my tag just transmits its position to the anchors but it should collect information where are the anchors based on his position.
Is it possible to somehow change this on the tag?
On the tag Tx led blinks ,while the Rx not blinking at all.
ppoirier
May 1, 2020, 12:30am
6
Just give him a few time @rmackay9 is quite busy
Good Luck
HilHr
May 8, 2020, 12:58am
7
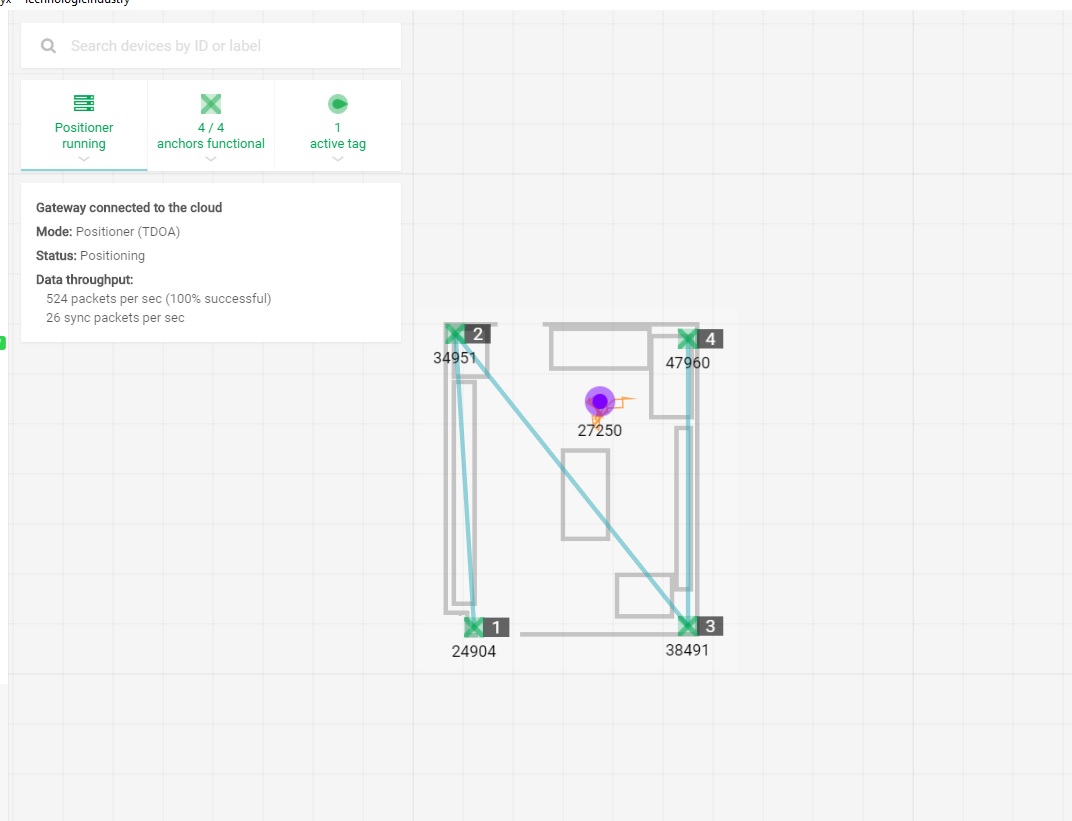
I successfully upgraded the tag (2.2) ,anchors (1.7 ) and gateway software (2020.2) .Unfortunately, I still get an error in the arduino.
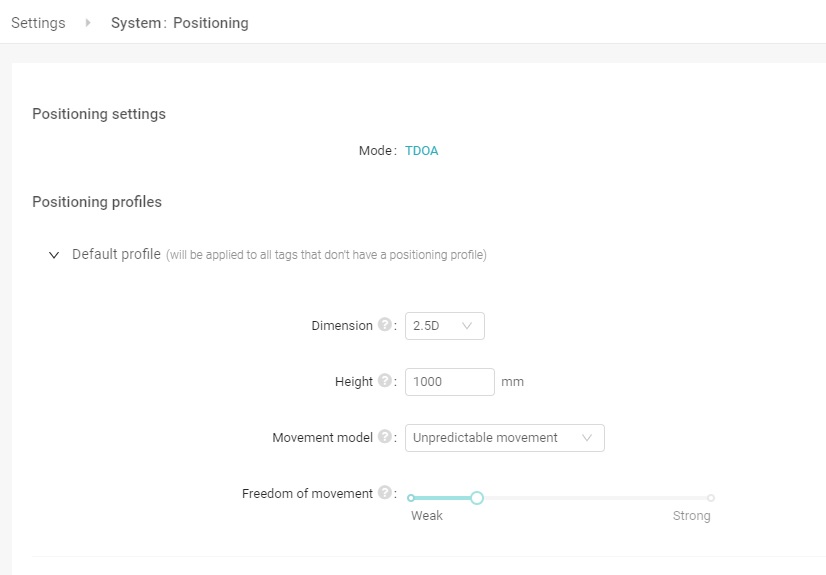
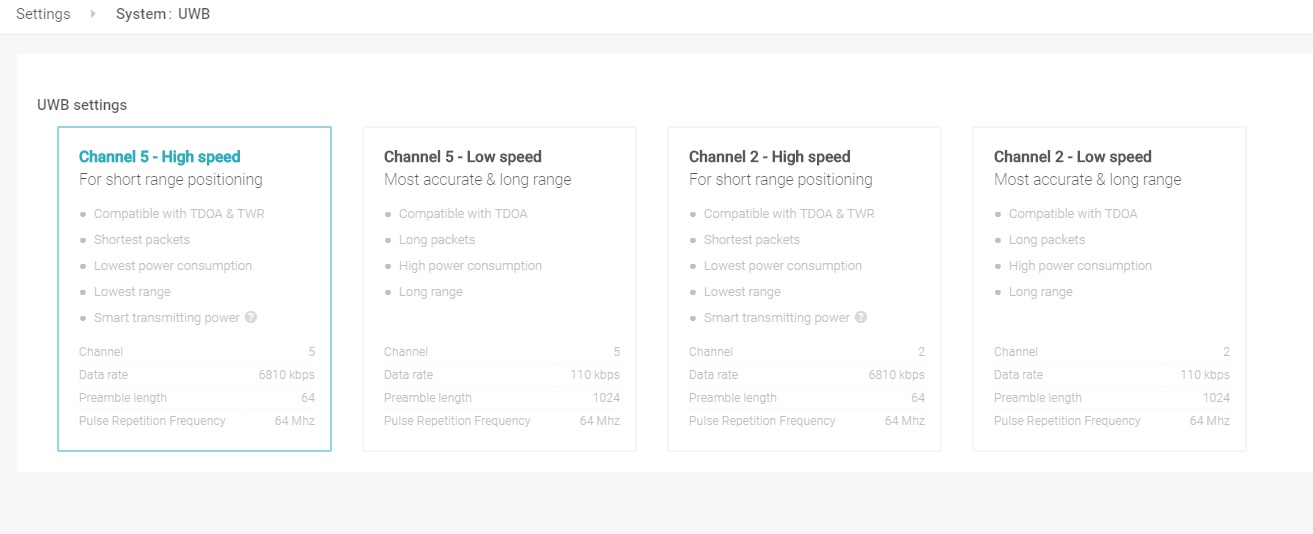
Please look at the configuration , I think I set everything up well according to the instructions , but unfortunately there are no instructions/parameters that I need to set on the tag, gateway and anchors themselves.
RobGei
September 28, 2020, 9:03am
9
HI there,
the problem is the assertation for the Tx Power in the Pozyx lib. In the current IndoorLoiter sketch it is set too high. Try reducing it:
#define CONFIG_TX_GAIN 33.0f
That should work.
Best regards
1 Like