I’m using Quadrotor with following hardware
Frame: Custom Made X
Motors: T motors U8 lite KV85
Propellers: T motors 29x9.5 foldable
ESC: Alpha 60A HV
Battery: 12S (2 x 6S, 30Ah, 5C, T-Drones)
Cube Orange with 4.1.5 firmware
MTOW: 11 kg
Problem/Issue
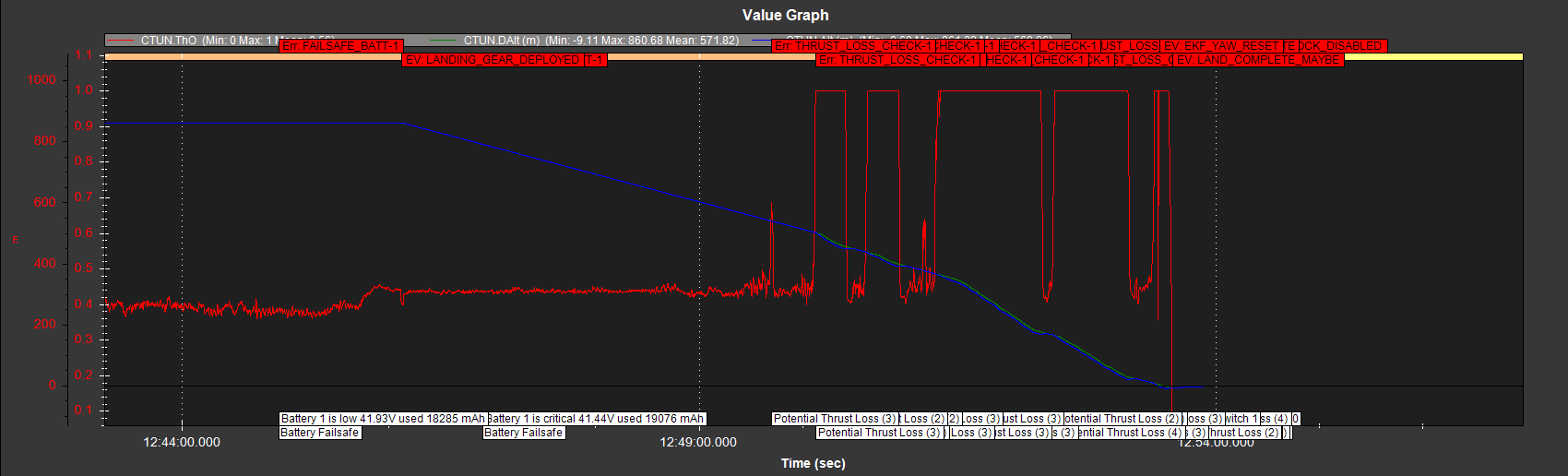
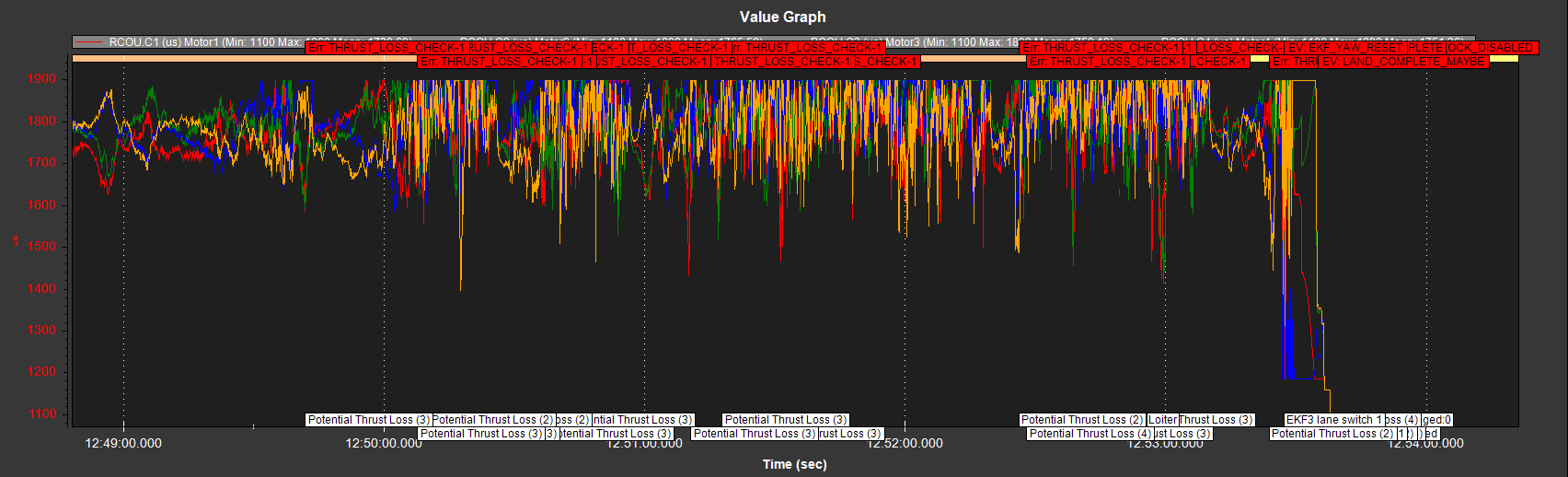
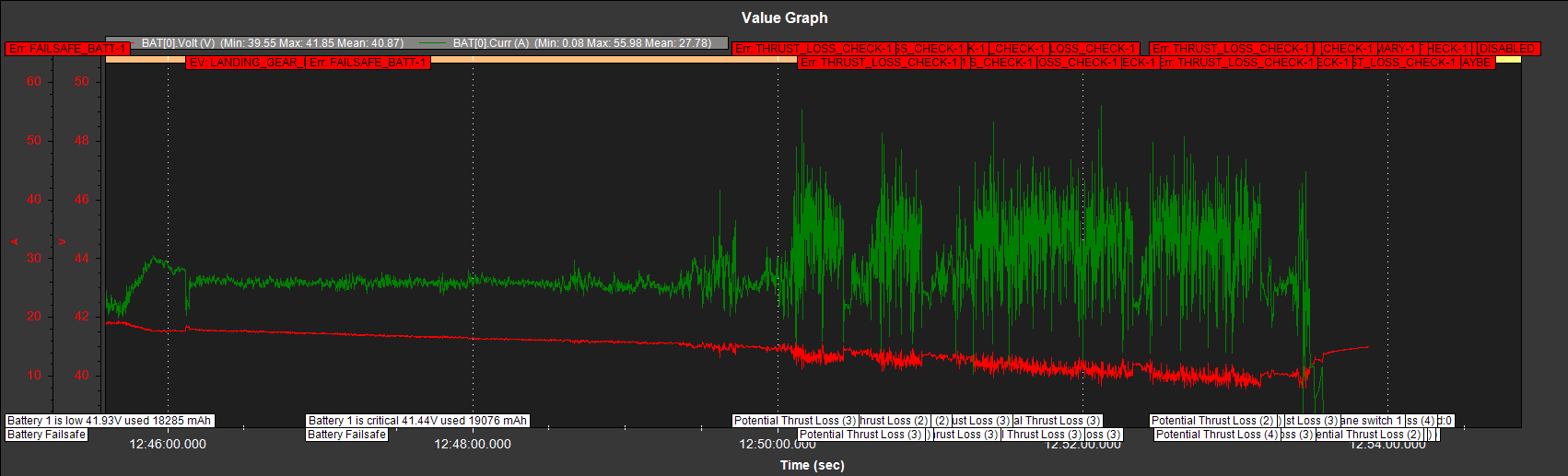
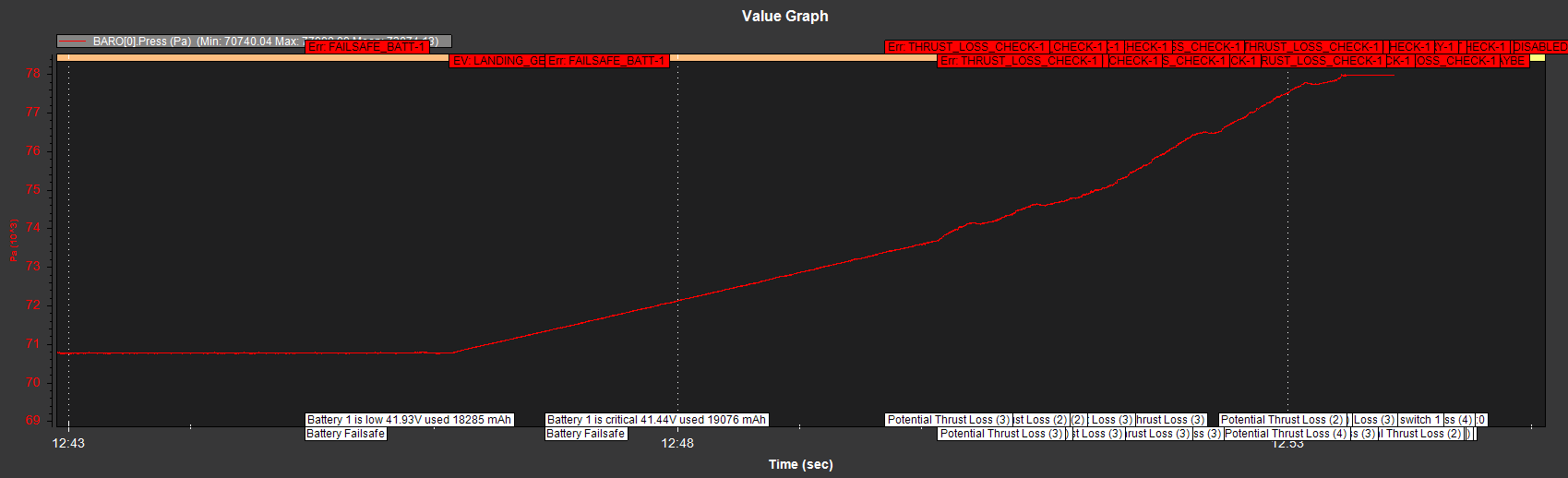
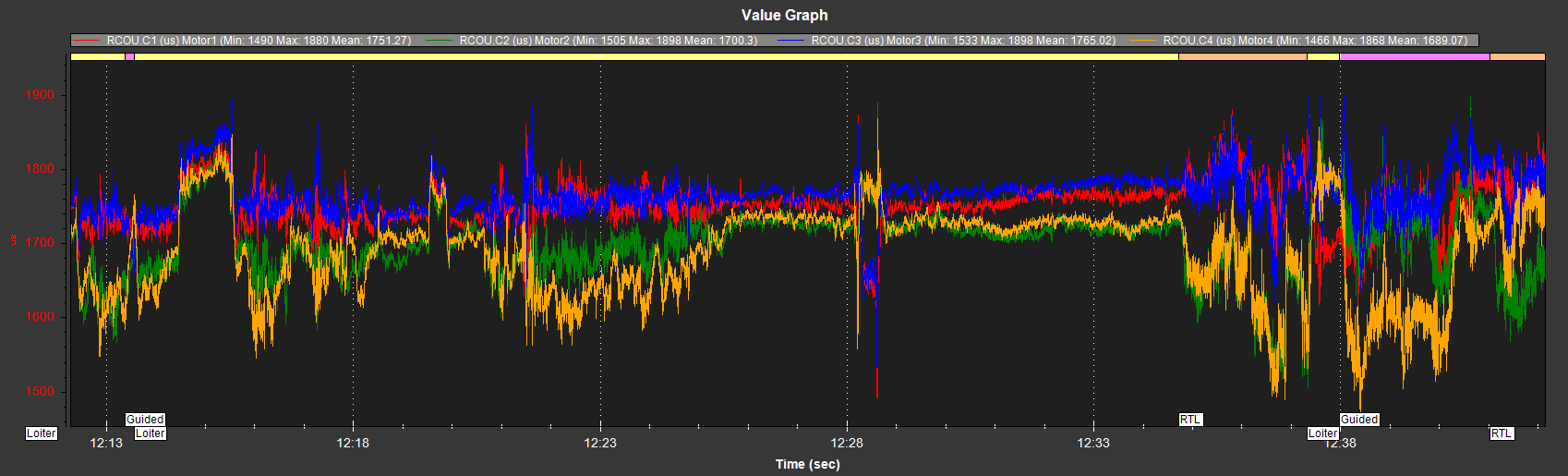
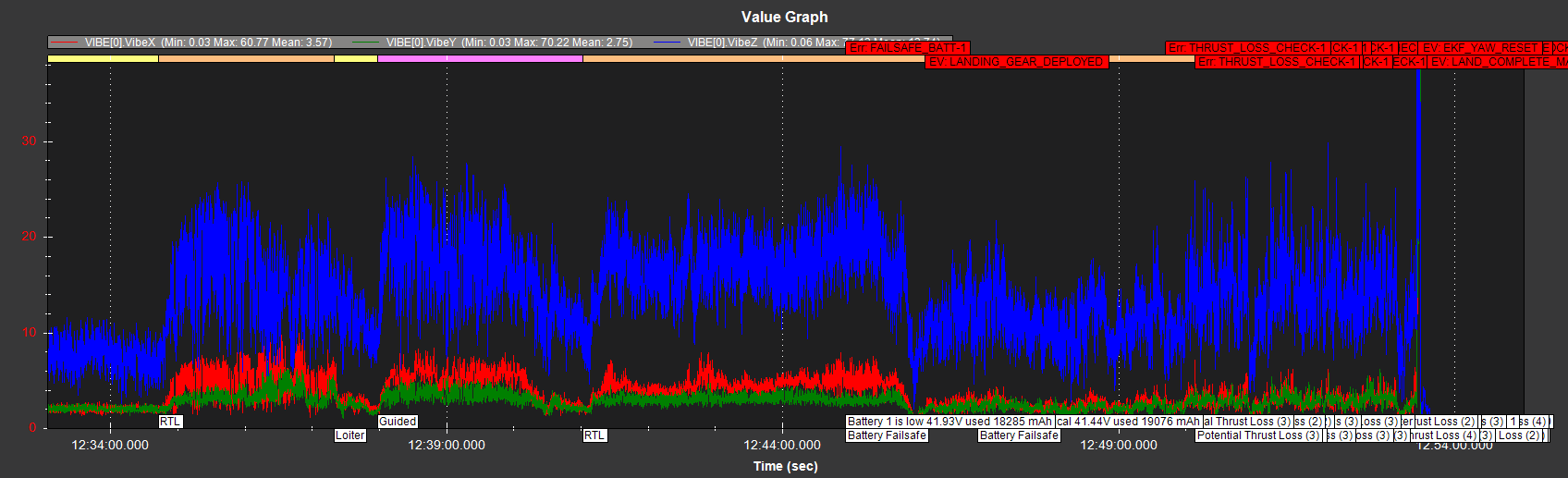
In open plain areas (<4000 ft AMSL) my copter flies very well without any problem. I even took it to 700m AGL and vertically descended it without any issues. I took my copter to a little trip of mountainous terrain. While test flying the copter at high altitude (8000ft + AMSL), I faced potential thrust loss warnings on multiple motors towards the end of my flight (48 mins) Battery Voltage was around 41V. I had limited the descent rate to 1.6 m/s but it was not maintaining it; sometimes reaching 2.5 to 3 m/s. It was getting difficult to control descent rate of the copter and it landed very hardly on surface. Also I want to mention that I have increased the ATC_THR_MIX_MAX to 0.7 to give priority to attitude control over throttle. Why my motors were maxing out while descending even when my copter is adequately powered. What could be the probable reason for such behaviour?
totally these problems make more battery pressure and it will make hard to keep altitude for FC and more pressure on motors and make them hot by amplifying vibration by D Term
and note that your motors will spin more when you are flying upper mountains because of lower air pressure and it will affect your flight performance that’s its common to me that i fly in Tehran 1400m upper than sea level
I agree with what Hosein has said. That flight should have ended about 10 minutes earlier. The five points you’ve suggested, I would say that all of them apply. The battery was run far too low. Altitude will decrease performance so what you’d get away with at sea-level or even 1000mASL, won’t work at 2500m.
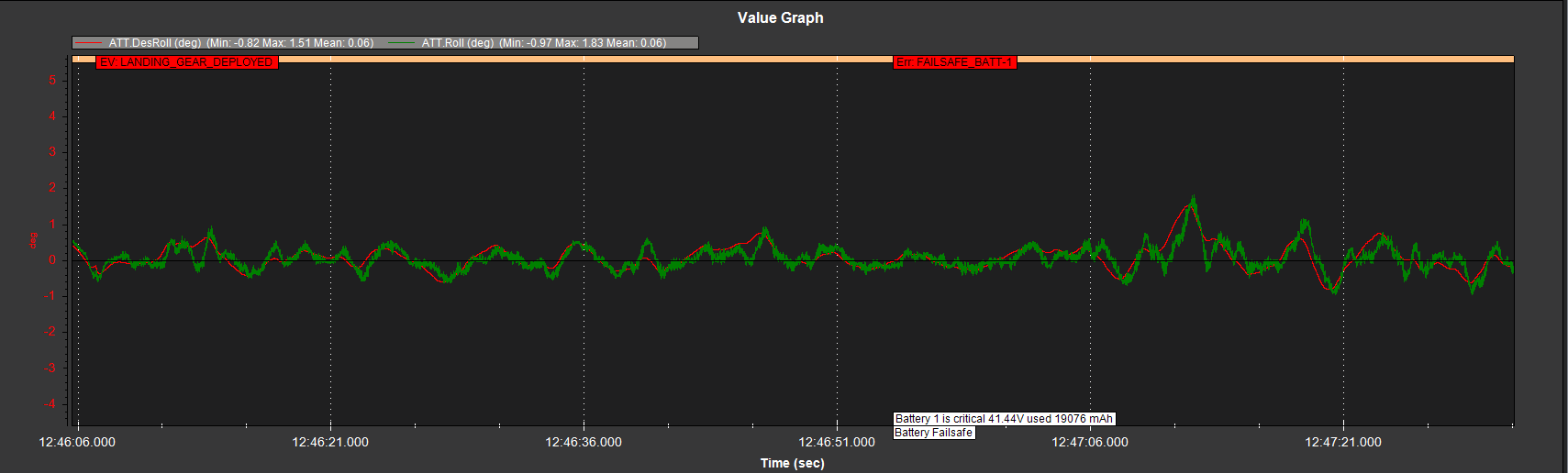
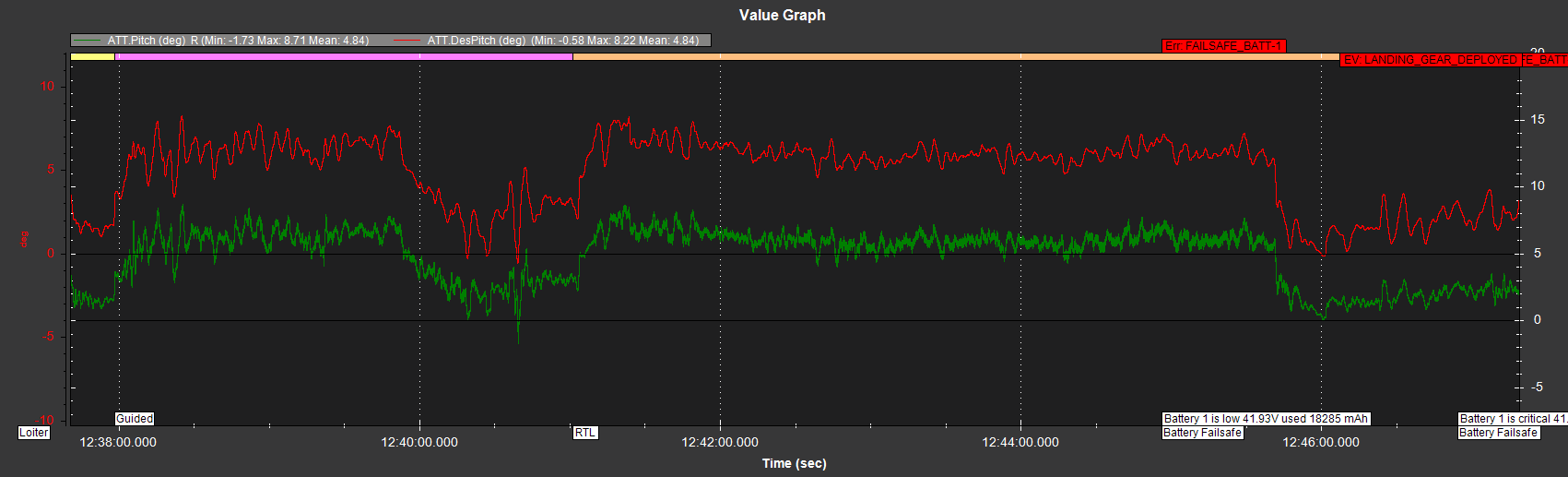
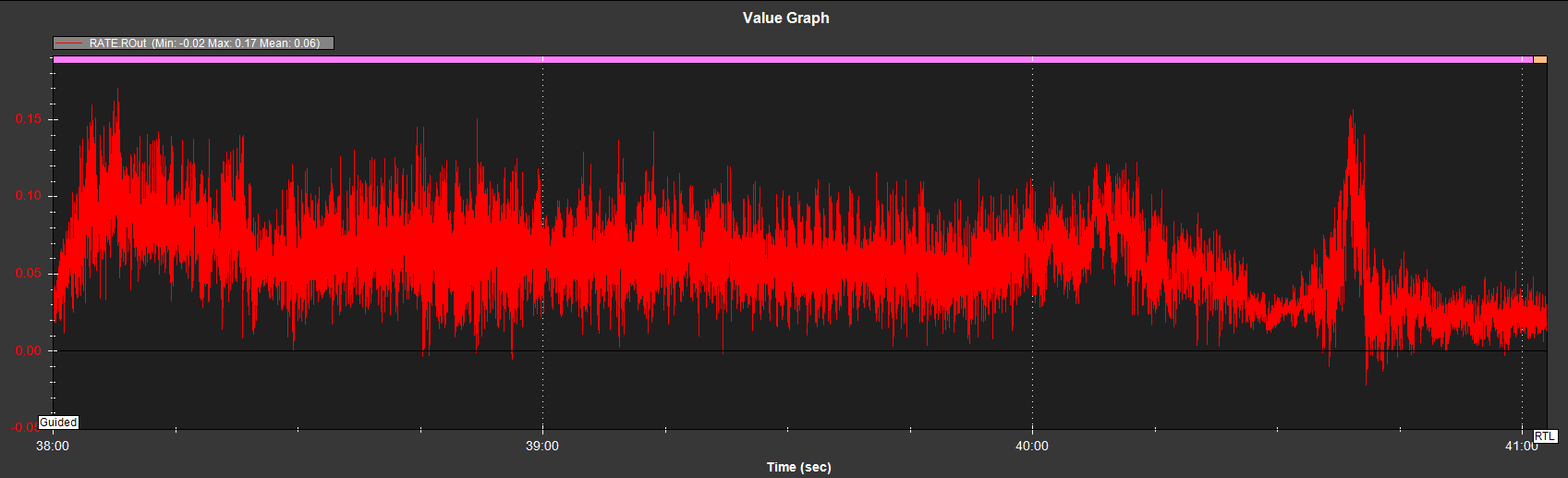
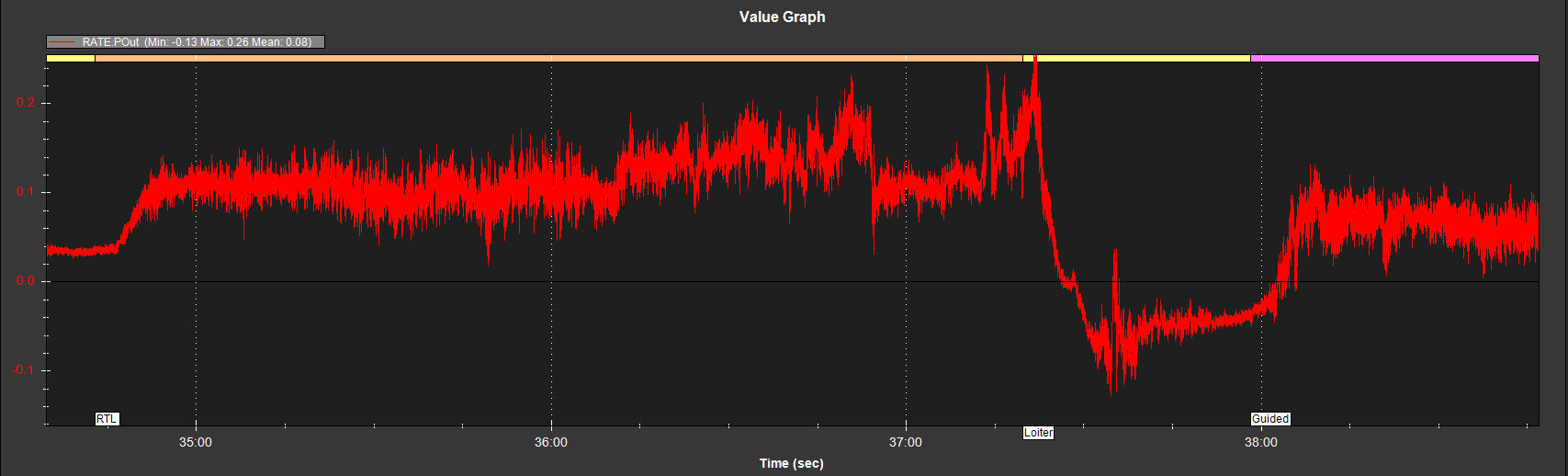
Have you run auto-tune on this? The PID values look very default. Pitch and roll do not track well with their desired values. The overall flight performance would improve with proper tuning.
You should update to 4.2.2, and finish all the required tuning steps.