Hello, my friends. I’m using ArduCopter4.1.1.
The quadcopter, with its current weight, had a flight time of about 10 minutes. But now flight time is reduced and error “Potential Thrust loss” is observed.
I tried to keep the center of gravity in the middle of the quadcopter.
Could one of the motors be damaged?
Is there a way to ensure the health of the motors?
Can anyone help me, please?
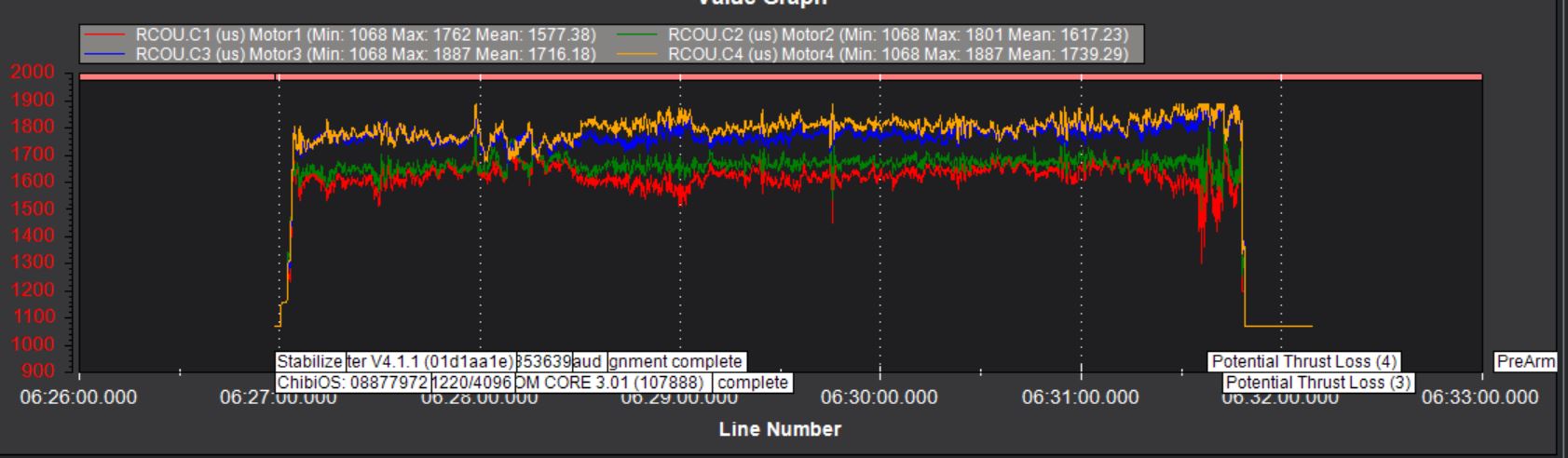
This craft is underpowered/overweight and it has a large mechanical Yaw bias (twisted arms, twisted motor mounts, etc). The average commanded motor output should be ~1500us. Your MOT_THST_HOVER value also indicates this.
The thrust to weight is too low for that configuration. Predicted hover throttle is ~70% which is what that log shows. If you had current logging there would be further proof.
T-motors data shows 730g thrust per motor at 50% throttle with 13" props on 4S. Fixing the Yaw bias will not fix this problem.
Look at the graph that @dkemxr posted. Motors 1&2, the counter-clockwise motors are working much less than motors 3&4 (clockwise). That usually means there’s a twist or miss alignment because there is uneven torque. It doesn’t take much. Near the end motors 3&4 are basically maxed out trying to keep things under control.
You are right. But I need about 8 minutes of flight time and I had about 10 minutes with the same setup before.
Do you think this flight time is possible with this conditions?
Can fixing the yaw bias improve the flight time?
No, it’s too heavy already so you can’t use a higher capacity battery. And as I said fixing the Yaw bias doesn’t fix the thrust/weight problem. It will still average to a higher hover throttle than you want for proper stability. You should have built that craft for 6S power.
LiPo batteries do age, and when they do, they increase their internal resistance, leading to higher voltage drops, and reduced flight times.
Fix the yaw imbalance, reduce some weight and get a new battery. Your flight time will improve. But the controlability will only improve if you reduce the weight a LOT. Or even better, do like Dave says and reduce it a huge lot or re-design your entire propulsion system:)
Indeed. If one believes T-Motors published data the take-off-weight should be ~3kg. Unless all that’s required is hovering for 10 minutes, then it could work…