I have a hexa copter with Hobbywing X6 motors and 23 inch propellers. The MTOW is 25 KG. While doing an auto mission the GCS showed a potential thrust loss message and the drone stared to descend and crashed. I am unable to figure out the reason for the thrust loss. Any help in figuring out the reason would be very helpful.
Attaching the log for the flight. The log is having 3 flights. Crash happened in the last flight.
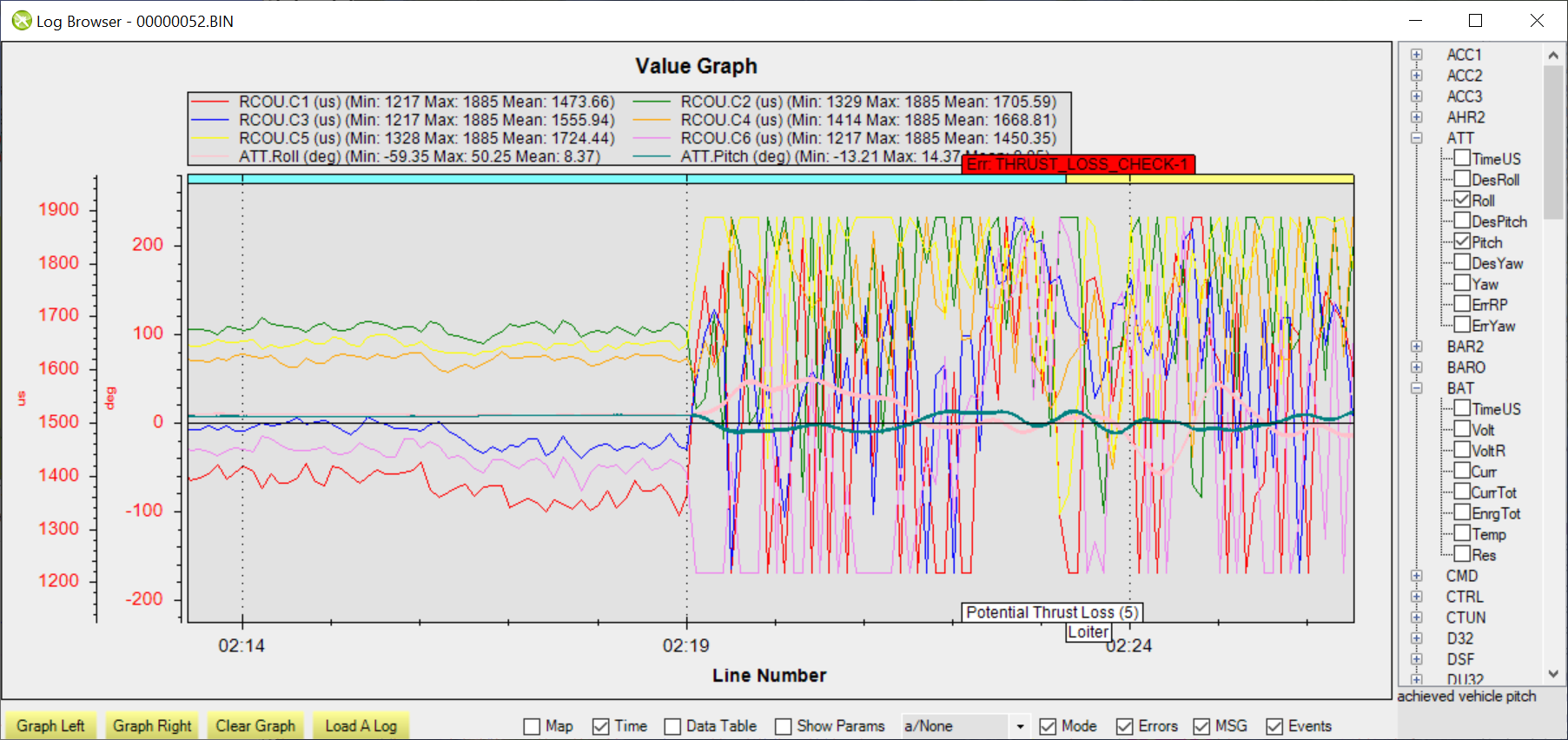
Hi, just guessing that the drone faced some probblems about the physical connection since ESC pulses were so noisy (pitch and roll too are free and they do not meet the control commands) right before losing thrust. Please check the wiring and let me know what you find.
It looks like a failure on C5 to me. Either ESC or Motor (or some sort of electrical disconnect. For what it is worth, your aircraft has a really bad yaw imbalance as well. I would fix that as well before continuing with flights. The aircraft might have been able to recover from motor failure if all motors were operating nominally.
@manavgandhi17 I also think motor 5 failed. But it’s a hexa copter and has enough power to keep the drone in air even if one of the moror fails. But that didn’t happen. The max thrust provided by the motors is 11.6kg/axis and the MTOW is just 25kg.
Do you think there is something else that needs to be changed before flying so this behaviour can be avoided.
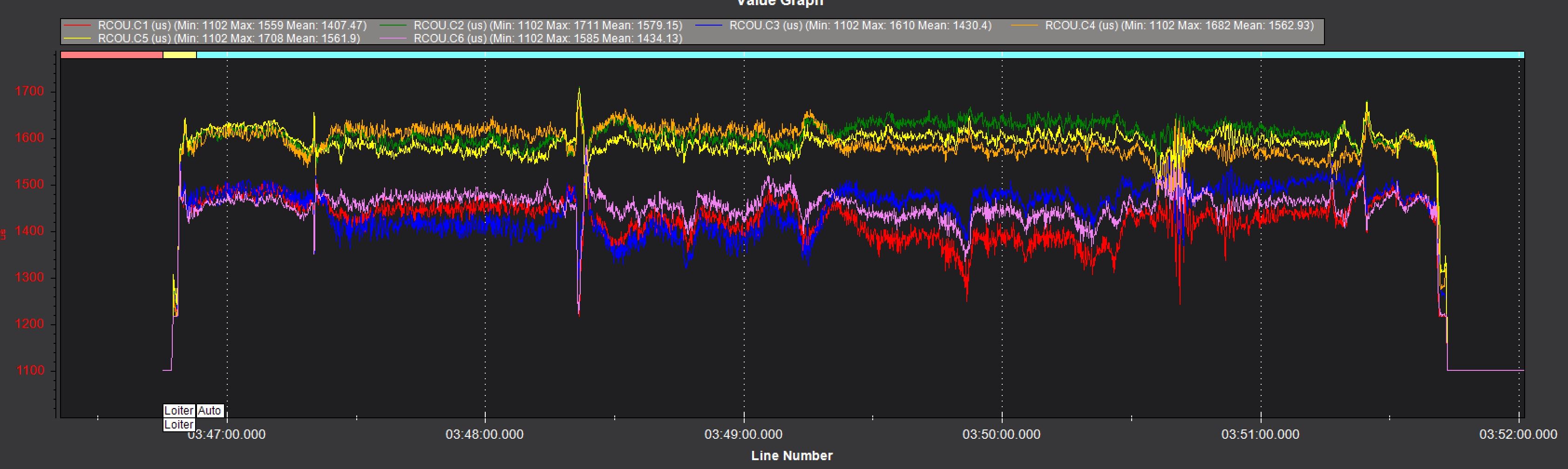
@manavgandhi17 already suggested what had to be fixed. The Yaw bias on that craft is very large. See the big difference between the CW and CCW commanded motor outputs?