Hello and thank you for taking time to read this.
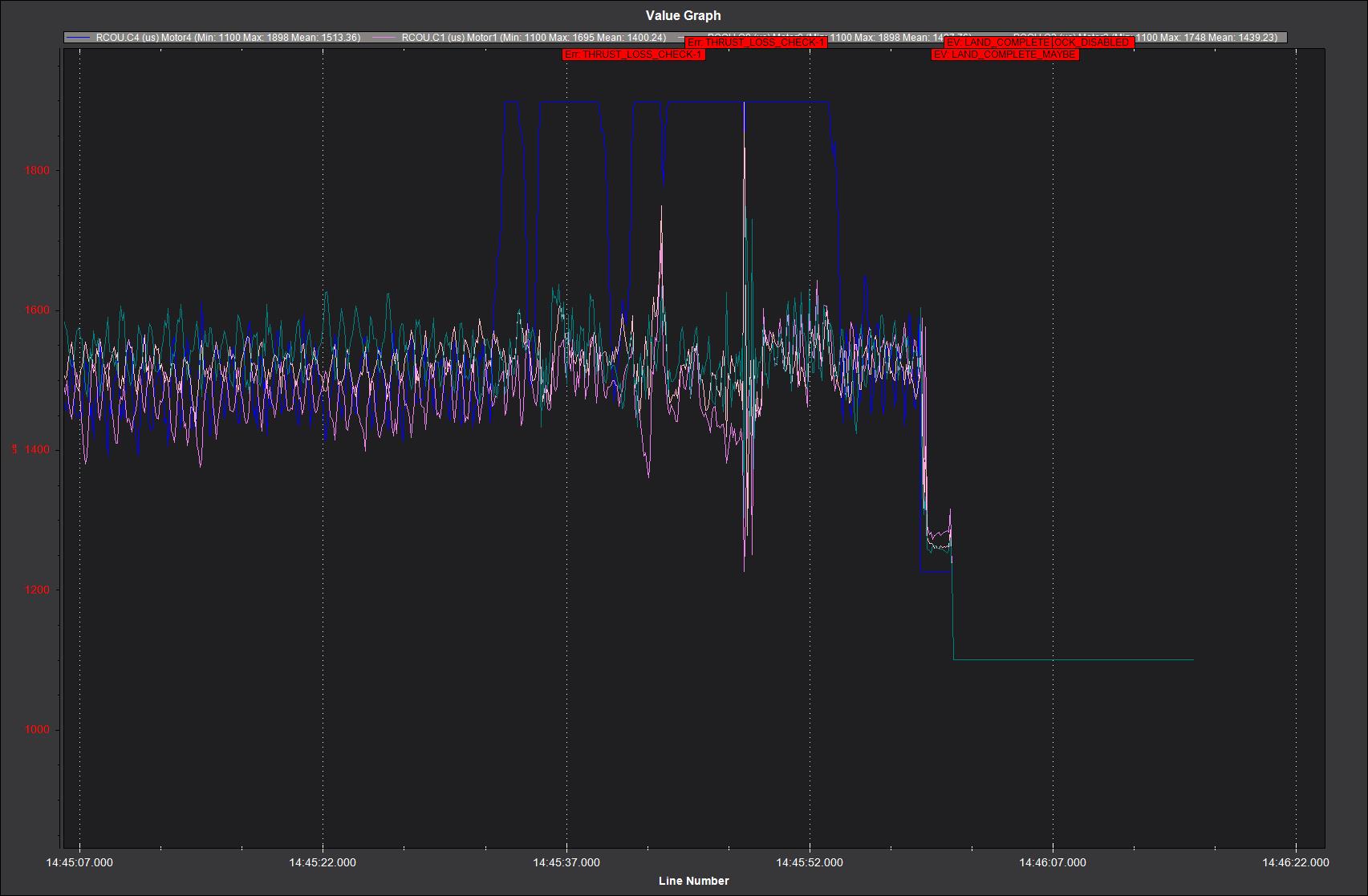
After 3 successful test missions following waypoints i wanted to test Battery Failsafe using guided mode. Failsafe triggered as expected (at 22.5V), but upon descent, the quad rolled 45 degrees left and right and had a sudden drop in altitude from about 10 meters (first potential thrust loss 4). After it hid the ground it bounced right back up almost 8 meters and then it descended rapidly until it hard landed again to a complete stop (breaking a leg and the battery case witch was 3d printed)
During this whole mission, battery has not been under 22 volts at any time, so i think it is safe to assume that voltage sag can be excluded.
Motors seem in balance to me, hovering at about 1500 without any noticeable difference between them.
Attached are the parameters used in this flight (resulted from a previous autotune)

I appreciate any help figuring out what happened or if there is something concerning in the log i may have missed to have a safe flight.
link for log file:
https://drive.google.com/drive/folders/14awSEQ2Zhce4SoKiMhJiGyxWHBbYzxe_?usp=sharing
7.4kg AUW
Quadcopter using tarot x680 Frame
T-Motor mn501s 360kv motors
17 inch carbon props
Tmotor alpha ESC 40A LV
CUAV x7 PRO with dual GPS (CUAV neo V3 PRO and CUAV neo 3)
Turnigy Graphene 6s 12000 Mah Battery