I have examined in detail the issues related to this error. But my problem is a little different.
In the subjects that were opened, it was stated that the tool was weak compared to its weight and the engines could not generate sufficient thrust.
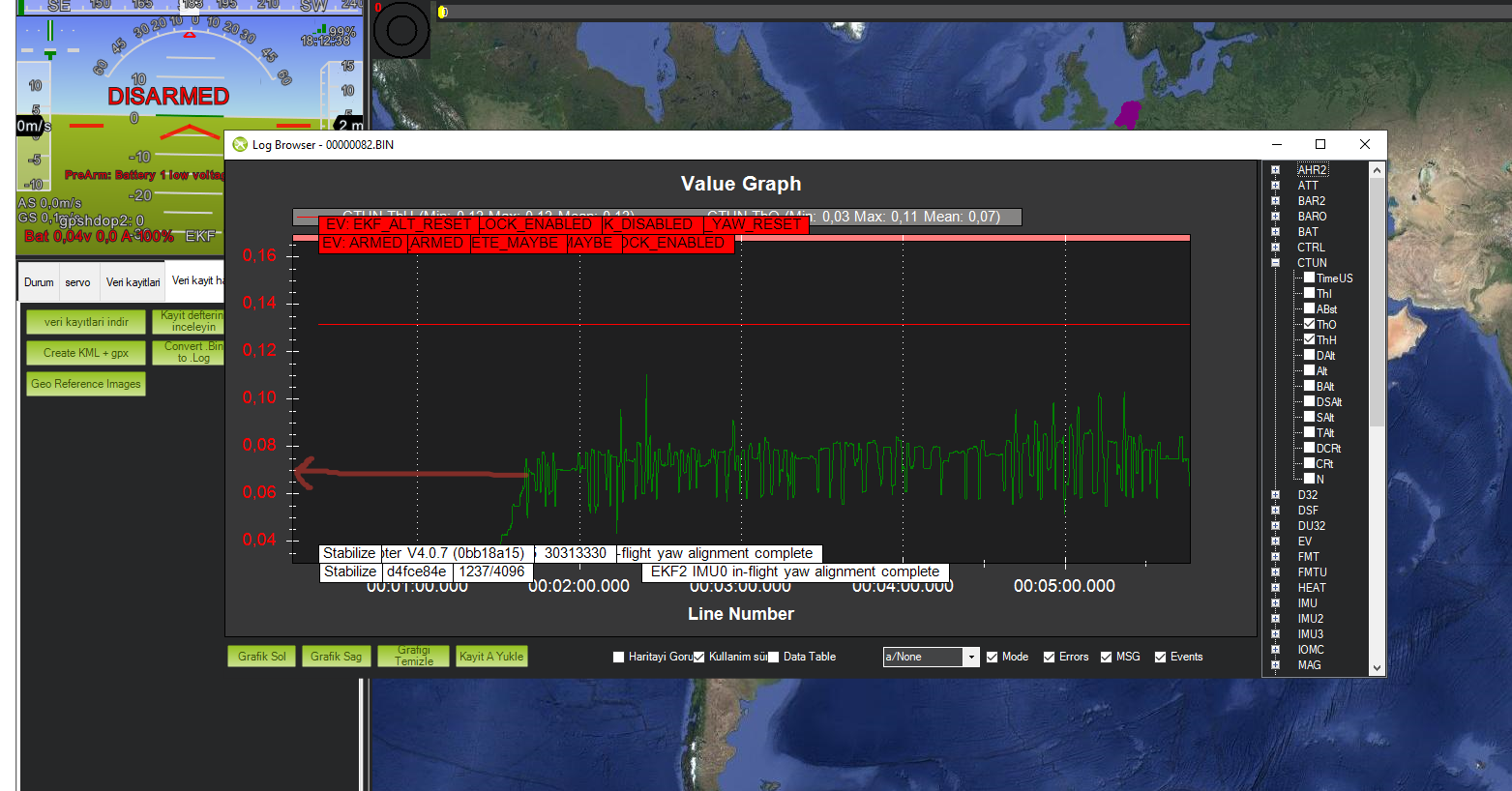
My Quad can be ventilated with 30 - 35% gas. It’s pretty strong. When the battery voltage reaches a low level, it should normally go Land. But suddenly it’s getting out of control. Extreme altitude fluctuations are taking place.
In summary, when the battery reaches low (<22v) it should go LAND, but it is getting out of control.
Thank you in advance for your help.
Note: I apologize for possible Translation errors.
AgriCulture QuadCopter
Pixhawk Cube Black
Eagle Power 6215 350Kv
2265 Karbon Fiber Propeller
Red Brick 70A ESC
Tattu 22.000mAH Lipo Battery
Current Monitoring is not possible because of high current.
I looked at your logs and your quad is WAY over powered.
The problem is you do not have enough resolution/granularity between full low throttle hover throttle. This makes take offs and landings very exciting. Because the props are turning slower than they should, all control functions are sluggish so the aircraft “wallows”.
From looking at the motor test data a 2265 is too much prop. The motor is rated for 2055 and 2255 on 6S. This will make things a little better.
I ran the numbers and for a fully loaded quad with a take off weight of 13kilos with 2255 props, a single 22000mAh battery will last for about 10 minutes. The key point is the motor efficiency of 5.771 Grams of Thrust per Watt of power is total crap.
If I were doing this I would start over and look for a motor/prop combination that would give me the necessary hover thrust at 40% to 50% throttle with the highest g/w possible.
@dkemxr and @OldGazer . Thankyou very Much.
All of them are problematic. 082 long flight. The accident happened. Others are short tests. The last four logs.
Dear @OldGazer and @dkemxr . How can I fix this problem. With what parameters? I would be glad if you help.
No, this is set while flying in assisted modes. Don’t manually change it.
The Rate filters look low. Set them to the Tuning plug-in suggested values (11Hz)
The INS_ACCEL_FILTER is low. Set it back closer to default which is 20Hz.
Z-vibe levels are high with clipping events.
Did you manually tune the Rate PID’s?
As @OldGazer said it has high thrust/weight. This will make it more challenging to tune. Less prop, add weight.
@dkemxr Yes. I made these settings manually. (I adjusted it according to the size of the PERVANE. ) I had reduced it to 10hz in case the vibration was high. I fix it right now
@OldGazer this aircraft with its intended take off weight. : 12500 - 13000gr
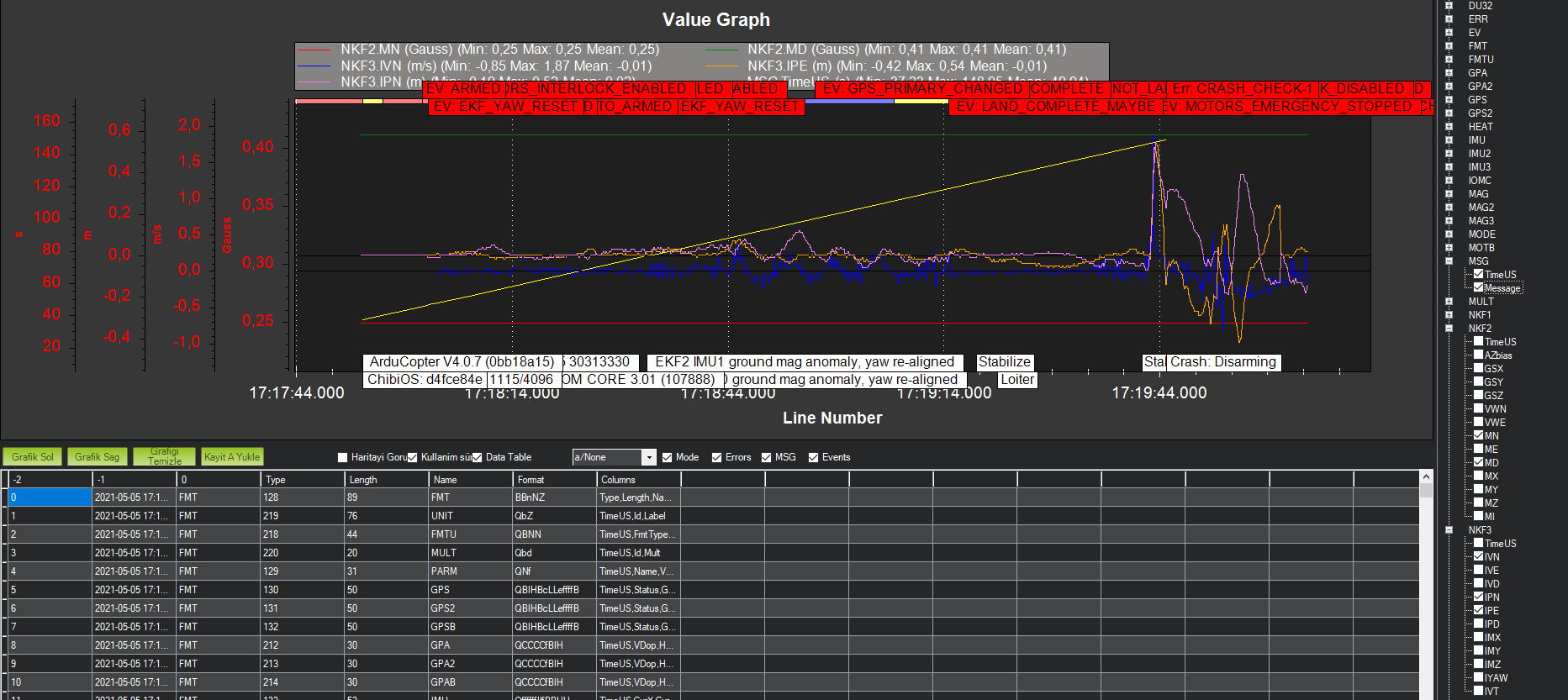
Hello again. I had an accident again today. There were sudden fluctuations in altitude while flying in Loiter mode. I got it in air stabilized mode. The drone suddenly rolled over and hit the ground. I add the LOG record with the accident. I am waiting for your urgent assistance.Hello again. I had an accident again today. There were sudden fluctuations in altitude while flying in Loiter mode. I got it in air stabilized mode. The drone suddenly rolled over and hit the ground. I add the LOG record with the accident. I am waiting for your urgent assistance.
.
There is a problem with Compass. I noticed it was giving a “Ground Mag Anomaly” error. Is it the place where I fly, troubled?
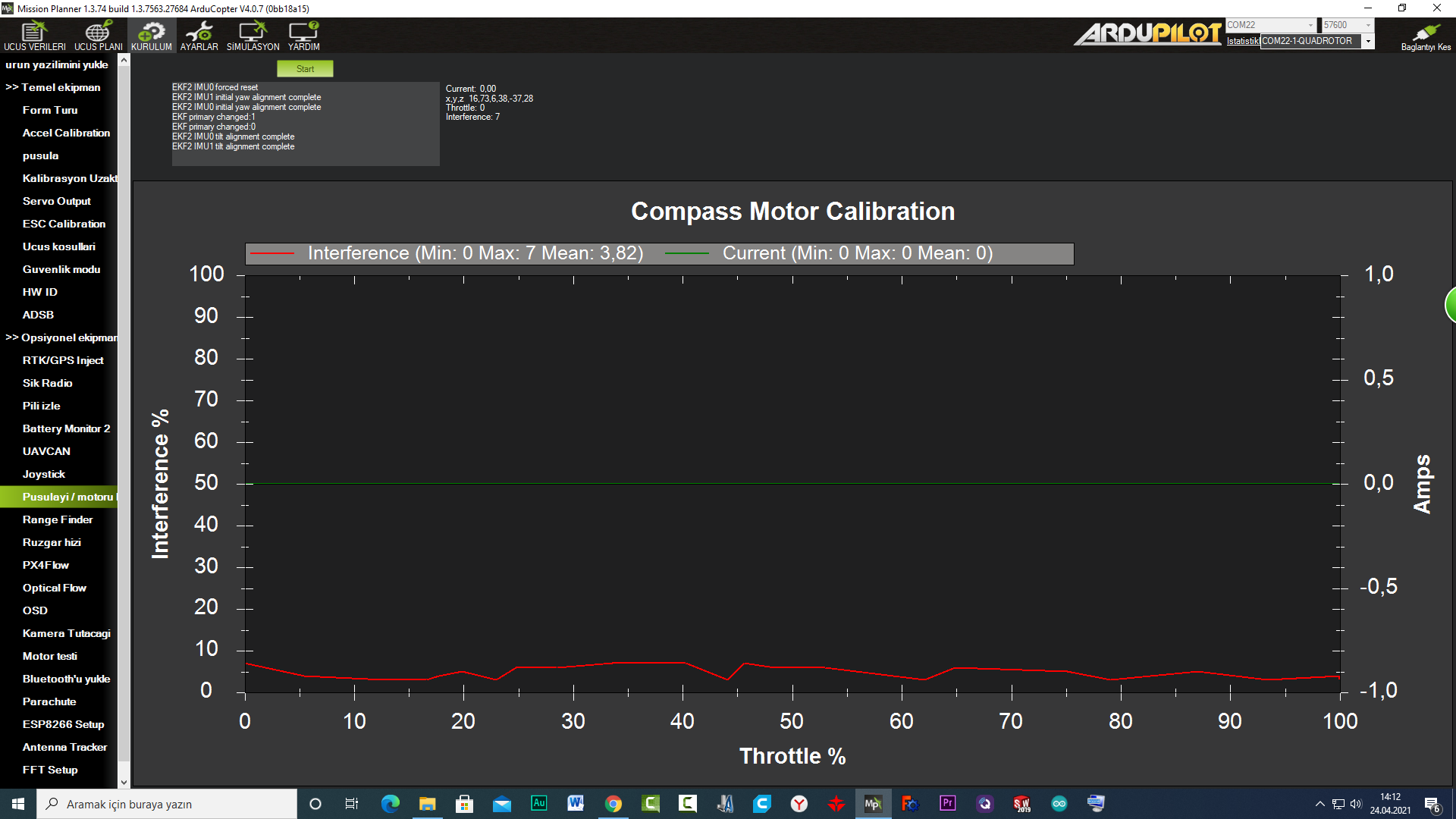
The same problem exists in the Cuav V5 Hexacopter. Whereas, in the Motor / Compass test, magnetic interference is at minimum. Both drones have dual GPS.
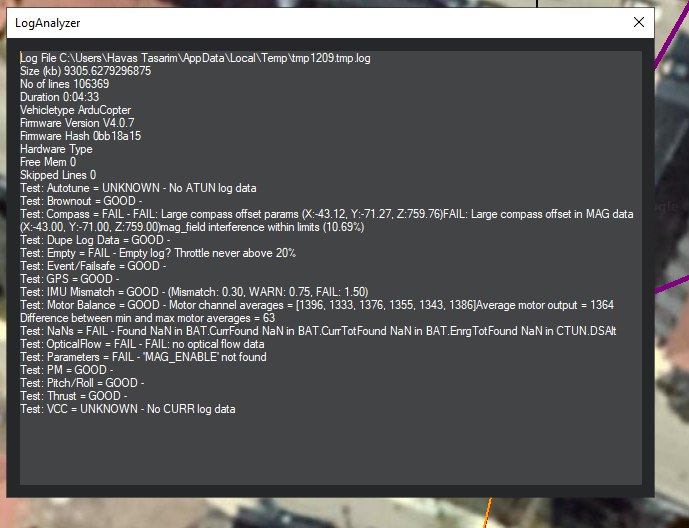
Auto Analysis is useless, don’t bother with that. For example the “Fail MAG_ENABLE not found error” is present because that parameters no longer exists. Disable the internal compass.
You have MOT_SPIN_ARM higher than MOT_SPIN_MIN. Lower MOT_SPIN_MIN.
It looks like you switched to Stabilize mode and dropped the throttle. That’s a for sure rapid return to earth.
Thank you @dkemxr . Thank you also for your quick return. . I will do what you said tomorrow. Is it normal for magnetic pollution, which is at minimum levels on the ground, to rise to high values when aired? For big drone.