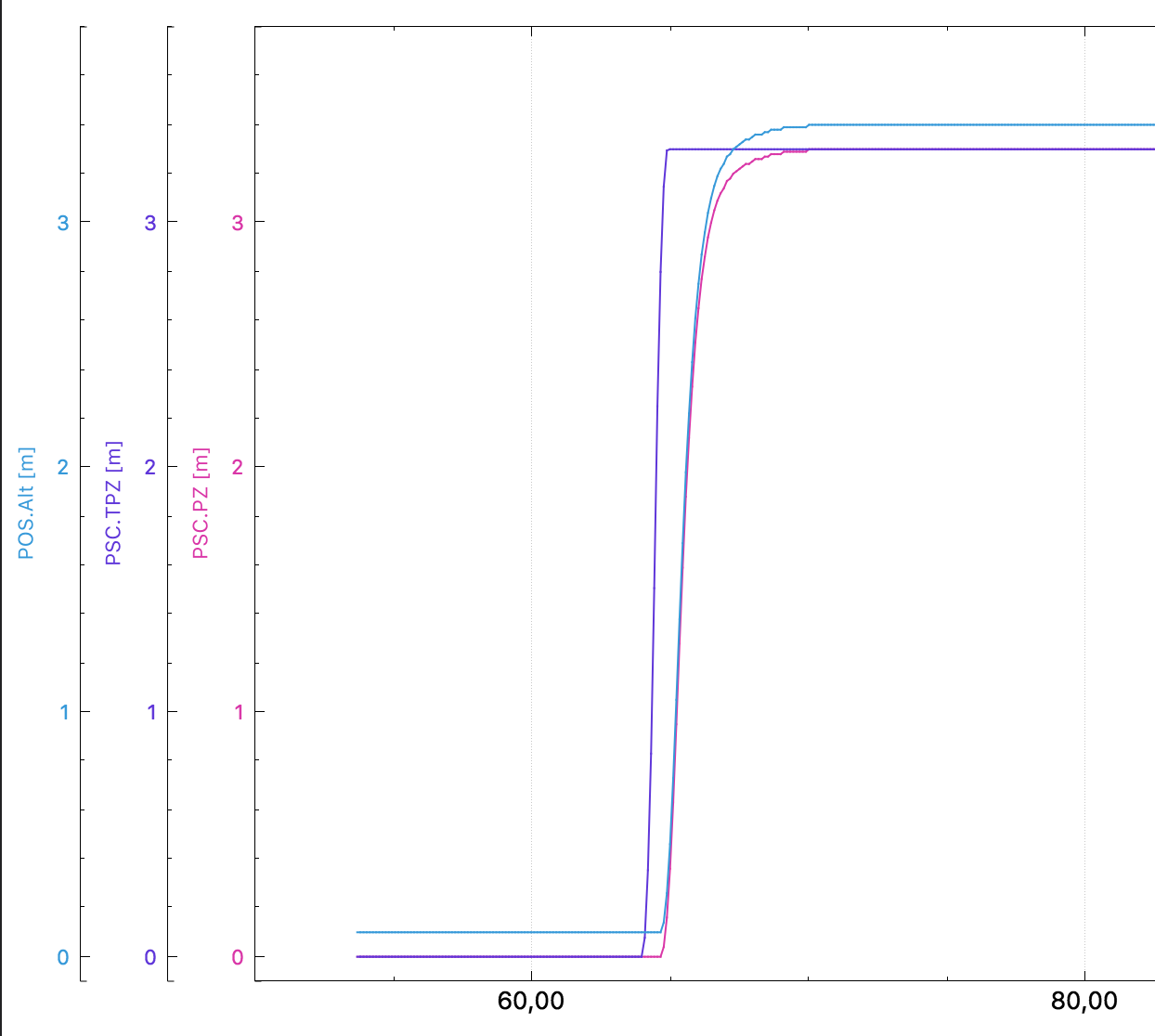
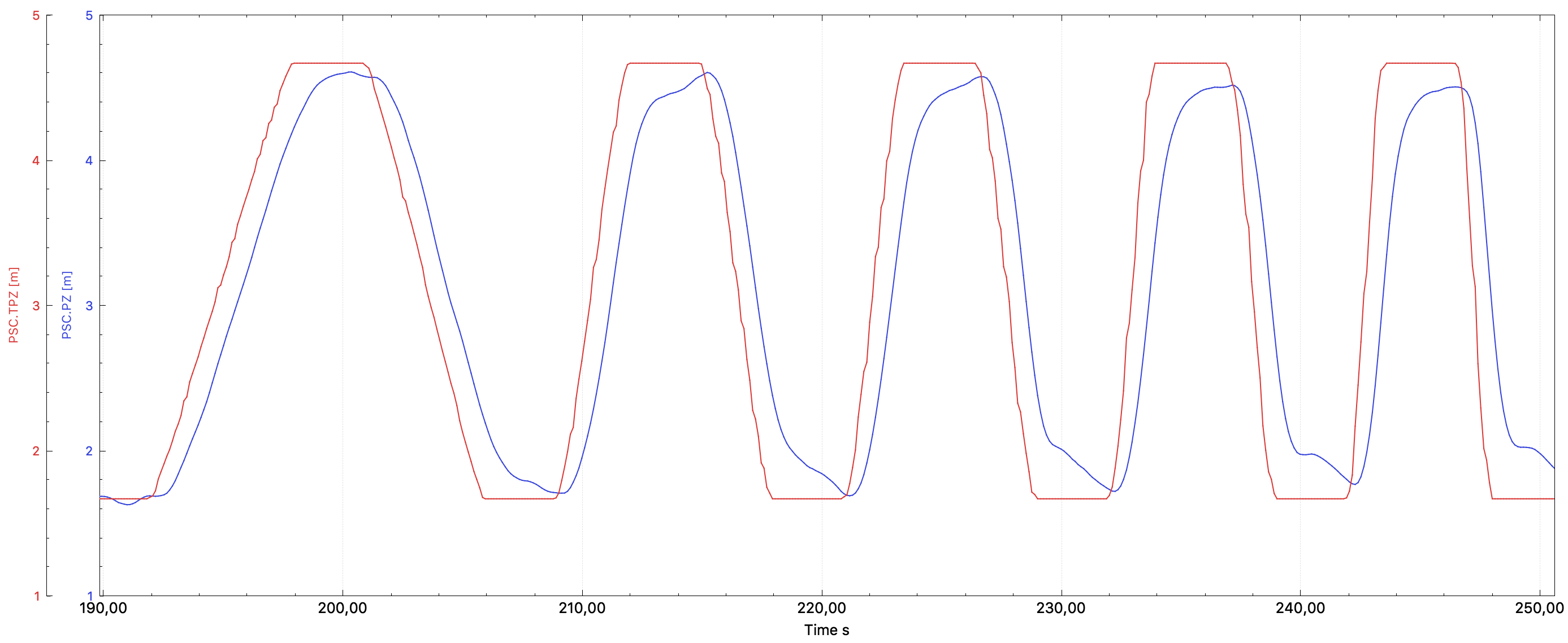
I’ve added position Z and target position Z to PSC log and confirmed that there’s a constant offset between altitude target and position of the drone.
Moreover on Z I can see much more delay than on X,Y.
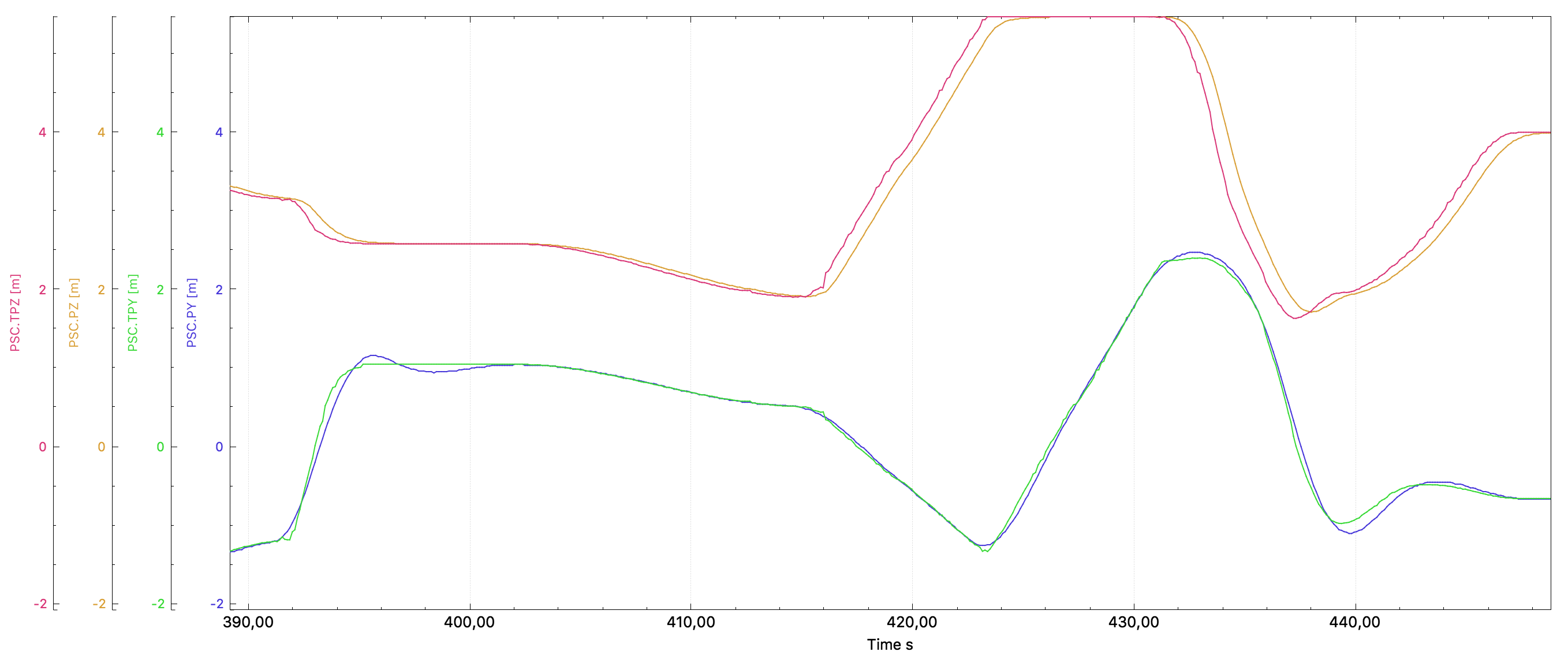
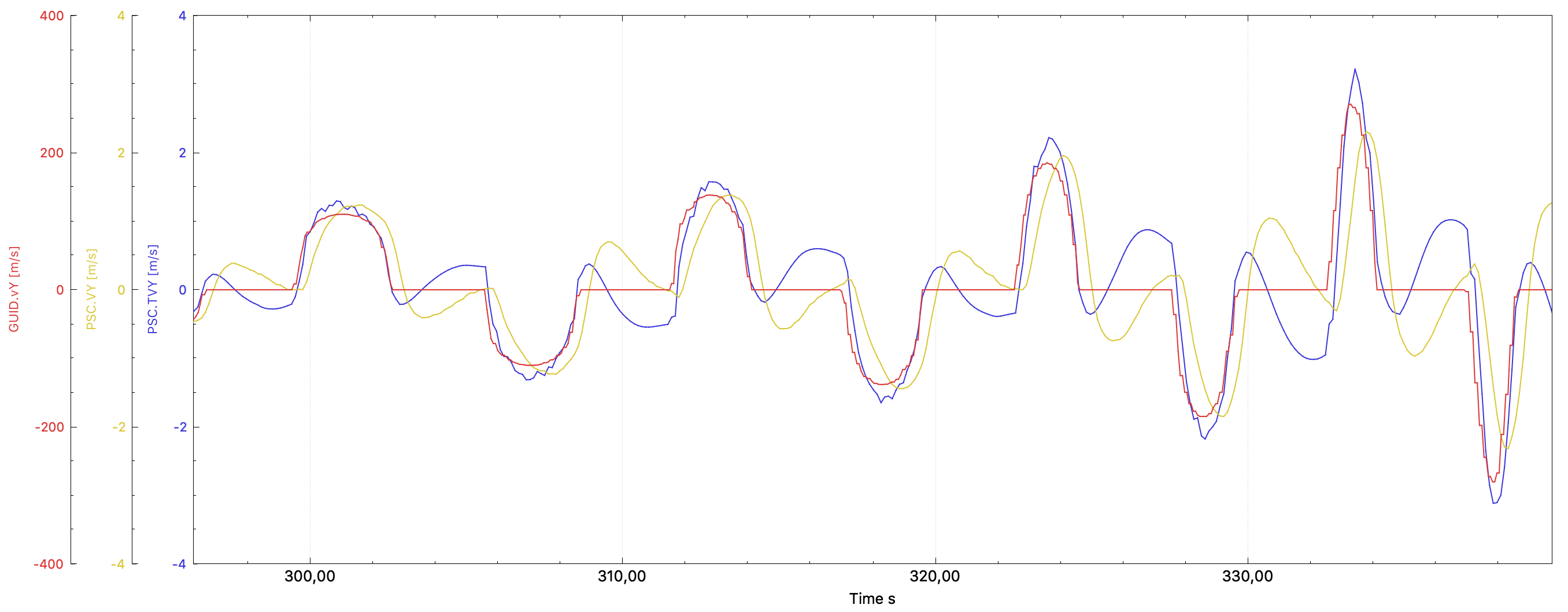
Cheating a bit with the scaling of the graph it’s clear that the performance on PosY (blue) against TargetPosY is way better than PosZ (red) against TargetPosZ (yellow).
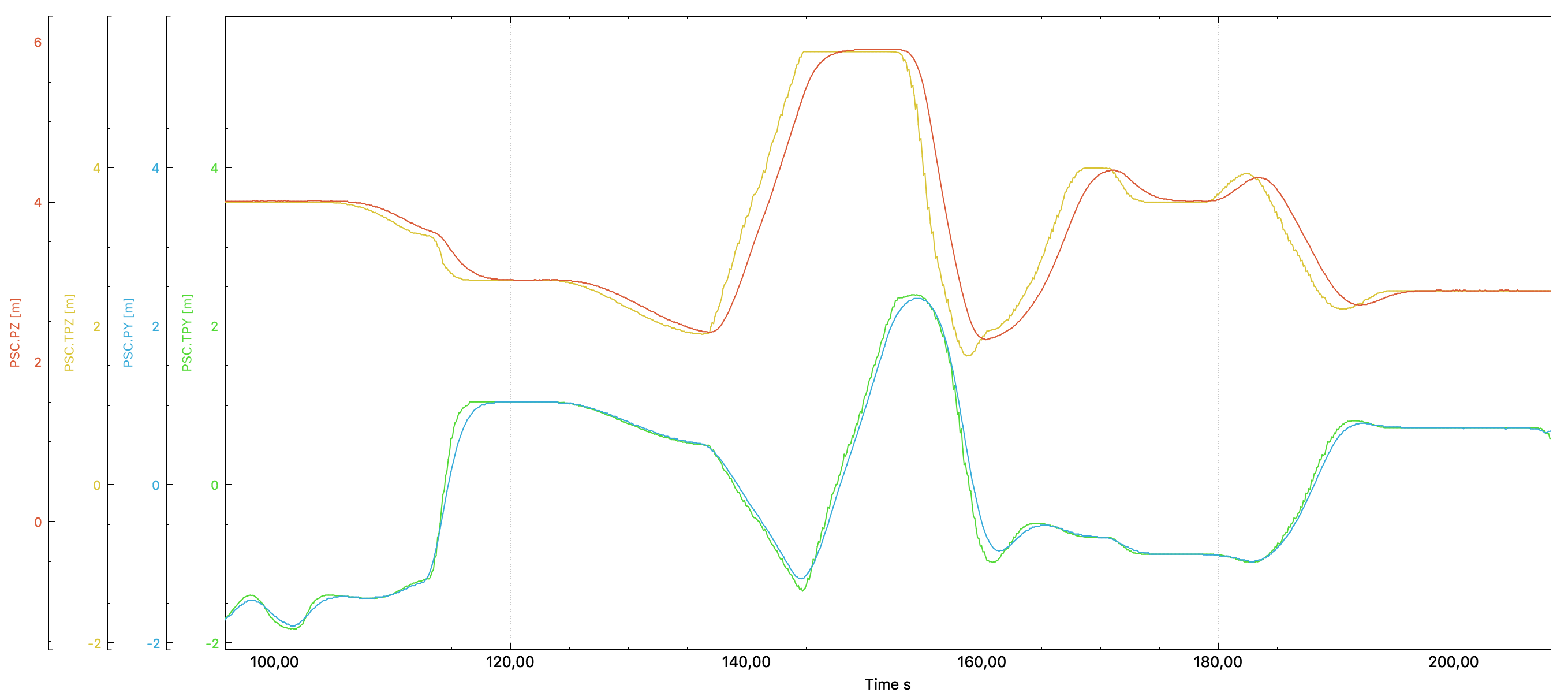
I hope that this is only a matter of PSC parameters tuning, but I’ve already tried a lot of values, the only way I could reduce delay was setting a very high POSZ P but it gives big overshoot.
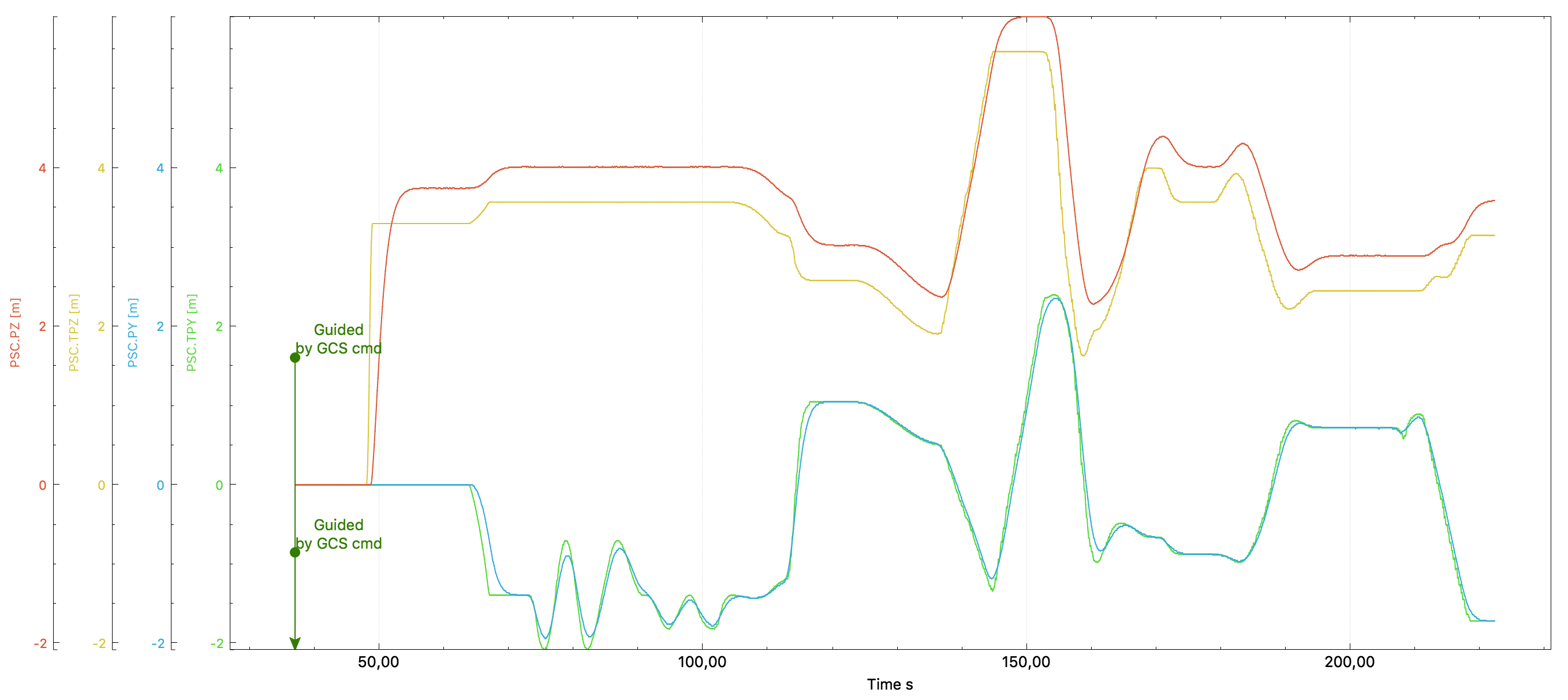
This is obtained in SITL setting target position and velocity at high frequency in GUIDED on copter 3.6.10.
I’ve tried also setting AHRS_EKF_TYPE = 10 to have ground truth position with similar results.
@rmackay9 @Leonardthall can you help on this? What are the differencies between horizontal and vertical controllers?