I am using Matek F405-wing FC with 4.0.6 FW. I have unchecked all the known boxes to associated with compass but I cannot shake off EKF errors.
My GPS is 3D-Fix (11 satellites) HDOP 1.04, I can arm it but EKF stays red.
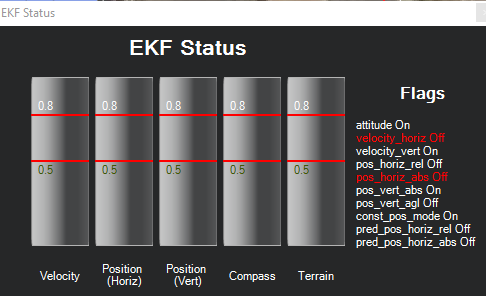
@RizHass mind that on setups with no compass, your EKF requires a GPS velocity vector to align yaw. this won’t happen until your airframe moves forward, so the final EKF yaw alignment will not happen until after takeoff, just a few moments into your flight:
so i personally would suggest to not disable EKF. make sure to have your arming checks set to default 1 (= all enabled) and you’ll be good to go.
It’s different behaviour,
if you want to fly as plane 3.4 : straight on track when using mission planning > disable ekf
If you want smooth flight et large drift > enable ekf.
I personally hate ekf for mapping purpose …
@kikislater with respect to EKF being one of ardupilot‘s key features i just think opting to not use it should rather be a matter of individual use case and preference than a general support forum advice.
Is its realy on-track or is is just showing that it is on-track but in reality is a bit off?
Youtr input is valueble because it comes from experice with real-world measurement equipment. Thanks.