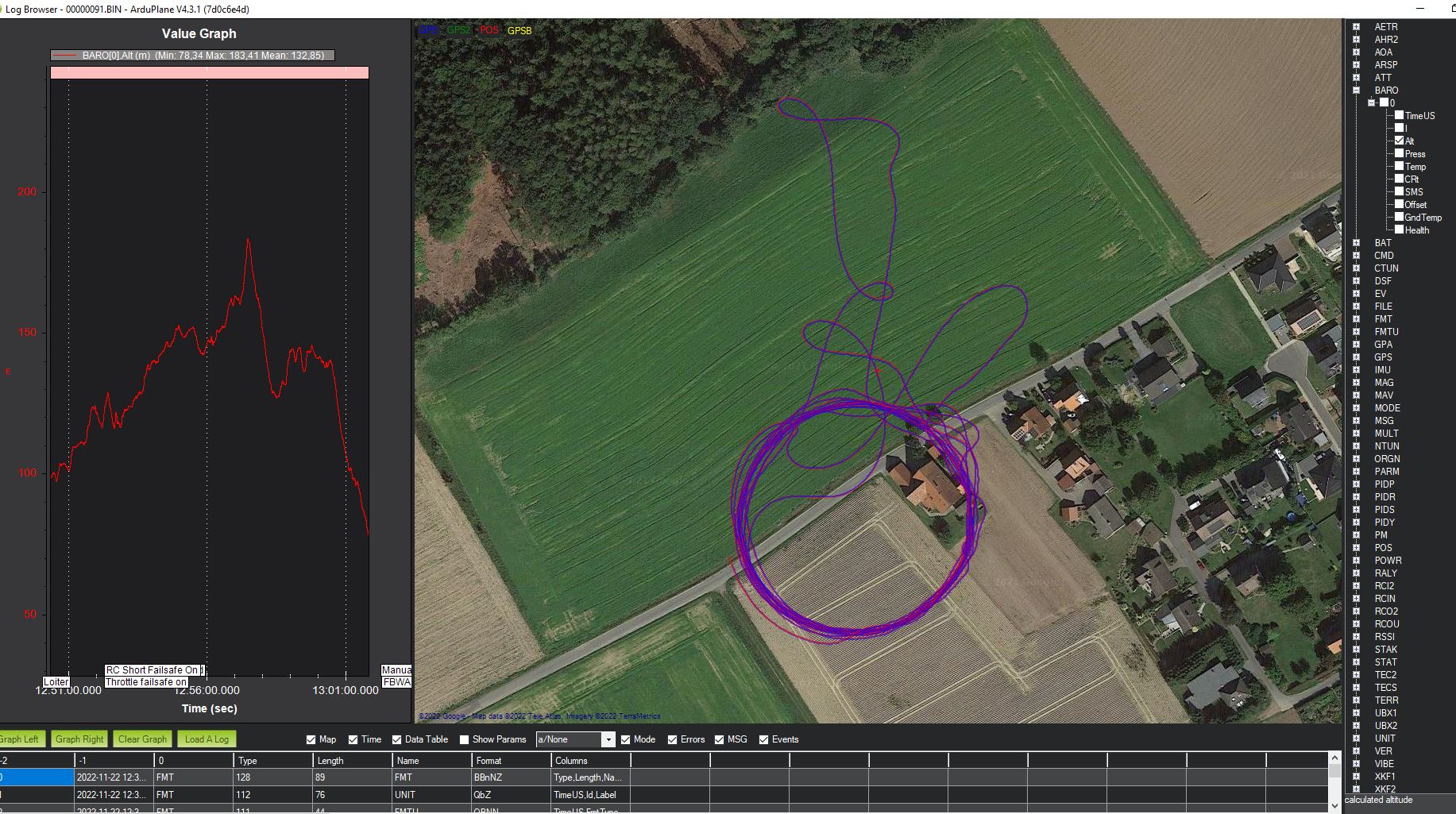
The issue is that the Plane is slow in any reaction so you have to plan the path early when flying manual, often I hold the rudder just at a few degrees to slightly begin and end a curve, the Glider needs time to react. I build in a Matek 743 WLITE due the plane has no thermal breaks or anything and for not loosing in brutal thermic I can swith RTL. At present I try to tune the FC to do so, but he input from the FC to the Rudder is so hectic, the plane will even not react. I tried a Loiter at our local hill in the thermal and within of 30 circles he left the circle a few times, see above picture.
Your Opinions are welcome an I’d like to try out anything that might help and solve.
Thanks in advance Matthias
Thanks Allister, think these were the amounts I started with, but as there changed a lot of Parameters, I will keep everything as ist is and change these two ones, will see and let you know.
Presently the Rudderservo seems to alternate on its own have to change it, think there’s a damage at the KST Servo and it was quite expensive .
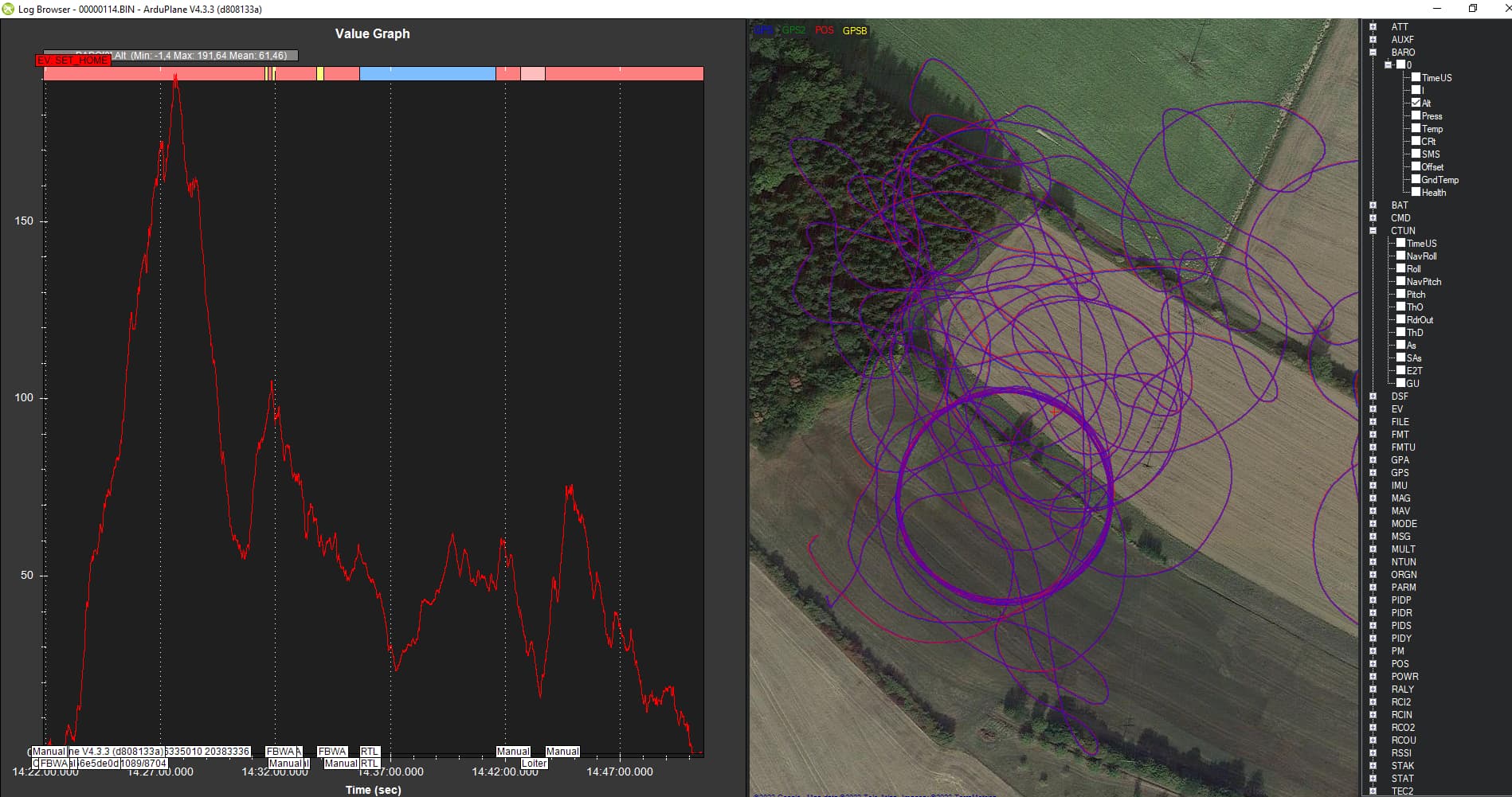
took a while to get out again and go fly again. The Problem with my Rudder servo a KST BLS 815 is solved, the servorate was at 50 Hz, but I found out that at zero Position the Frequenz is 333Hz, 1500µs and at plus minus Position 2000 and 1000 µs. So I set the servorate on 333 Hz and the Rudderservos stops to alternate, when the stick is zero.
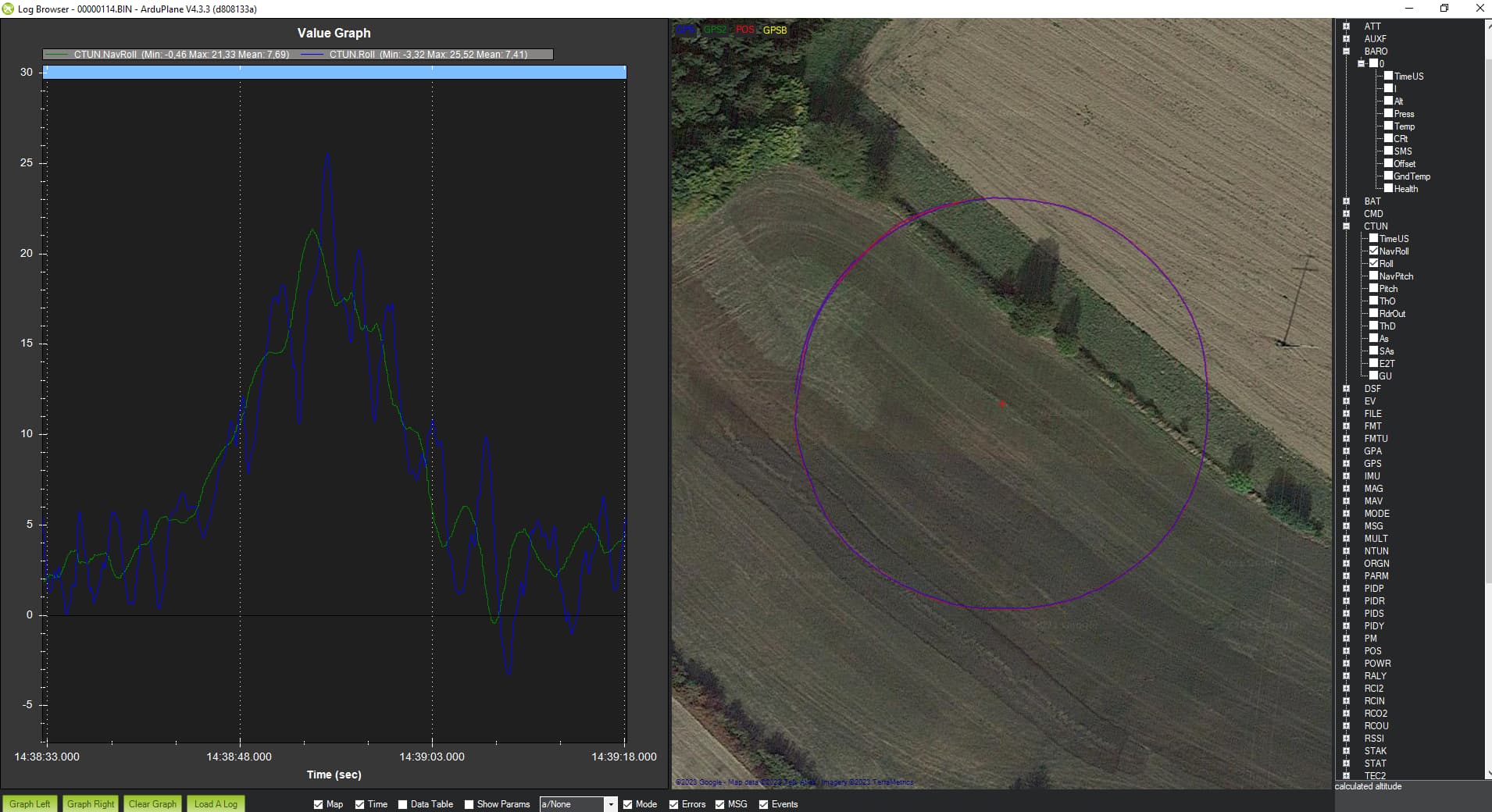
Everything is fine now, but what you can see in the end of the film is, that the Rudder is extremly hectic and goes sometimes from side to side, this leads in the end to so much steering that the plane is braking and has not so good glidepath as when steered by hand. With my 3 axis Cirrus I had it the other way round, flying by mission makes the plane to the best glide angle, you may not reach by hand and so in smooth conditions you can stay in the air when others must land. Here the Star 13 is a very sluggish 3,5m plane only steered by rudder, so the hectic movement of the rudder leads to nothing than braking.
Any Idea how to reduce but keep the plane on this super round course?
Presently no change the glidingratio is best in manual due the computer steering too much different to my cirrus, where the autopilot has the best aspect ratio. If anyone knows how i can reduce the hectic rudder input, make it slower and softer, please help, cherrs Matthias