Hi,
I set a DO_CHANGE_SPEED after takeoff to make it turn slower on first turn after takeoff. But our plane ignores DO_CHANGE_SPEED command and speeds up after takeoff. And this make it miss a turn and scatter. How do I make it turn slower to avoid this.You can see the scattering at the image below. The big purple loop is the turn that I’am talking about. We make 2 turns around two poles. And this happens at the first one rigth after the takeoff. We want it to make a slow, clean and close to waypoint turn. But it speeds up even after DO_CHANGE_SPEED. And we are hand launching.
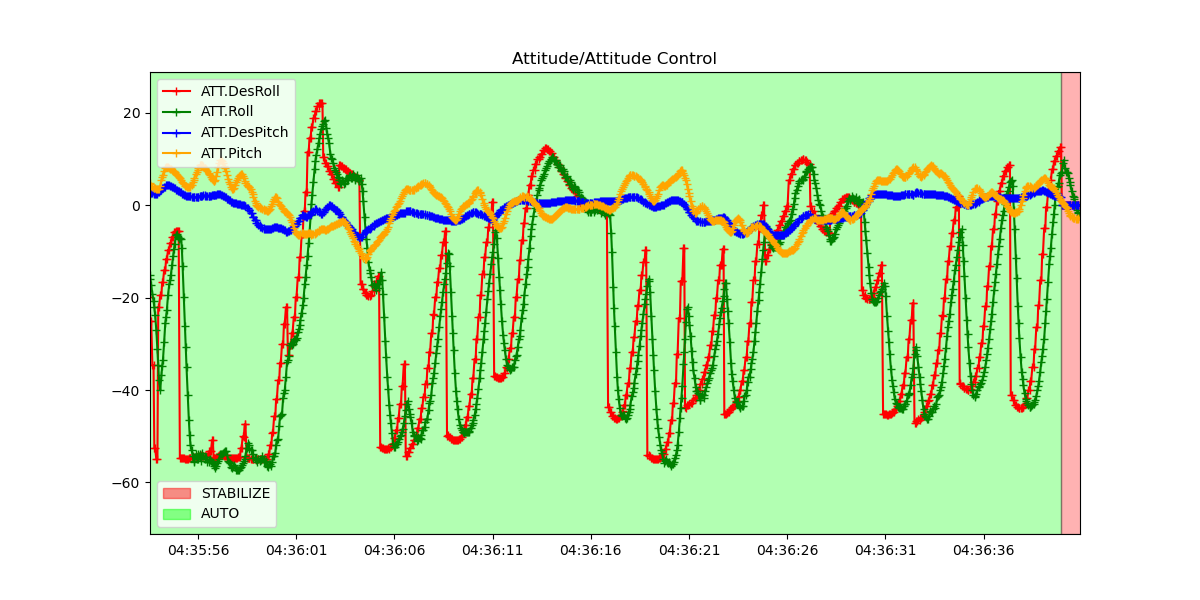
The plane may also benefit from some work on the tuning. You can see some wandering around the desired pitch. Roll doesn’t look too bad, but you might be able to improve it. I’d also set SERVO_AUTO_TRIM, 1.
Thank you so much for your reply. We solved our problem by removing takeoff from our flight plan. And we again made a AUTOTUNE flight. And we also removed our pitot tube. Because we don’t have that much wind at our flight area. Thanks again for your help
I would recommend leaving the pitot tube on if you have it. Planes will fly better if they have that data, however the arduplane synthetic airspeed calculations are really good.
It sounds a bit like you removed the pitot tube to mask a perceived problem that doesn’t exist. I agree with @Allister, best to use it if you have it.
Tuning the turning and perhaps reducing the max bank/rate/g parameters may keep you farther away from stalling in the turns, allowing for slower flight and keeping things safer overall.