Thats really awesome!!!
Unfortunately I am not able to test it this week because I’m out of town but knowing that it is confirmed is a huge step forward and it only proves that this matek F765 is a great FC along with Arduplane on it
Thanks!!!
I have a problem since I updated to 4.0. When setting the Amperes per Volt value in Battery monitor 2. I write the appropriate value but it is not fixed, when I open it again it is empty.
If I modify it from parameter BATT2_AMP_PERVLT, it also appears empty
Pixhawk2
Planer Mission 1.3.68
BATT_MONITOR = 4
BATT2_MONITOR = 4
BATT_VOLT_PIN = 2
BATT2_VOLT_PIN = 13
BATT_CURR_PIN = 3
BATT2_CURR_PIN = 14
Would it be possible to choose if the OSD is seen when activating the second camera on a Matek F765?
I have installed the second camera looking back on the plane and I don’t need the OSD in that camera.
I know that I could put an OSD panel without data and select it, but it would be easier being able to select whether or not the OSD is needed.
A greeting.
You can assign a switch to a channel, choose an OSD screen from the 4 available, put it blank and than choose it when you want to have a blank osd screen… thats simple… otherwise, as you will need to assign a radio switch to switch the camera you want, you can program a special function on the radio to switch to a blank osd screen when you choose the back camera andthan choose the info osd screen when you choose the front camera.

I’ve just released plane 4.0.1. This is a minor release with a few bug fixes and enhancements over 4.0.0. Changes are:
- Added Q_ASSIST_ALT parameter which offers a way for VTOL assistance at low altitudes
- fixed channels 5 and 6 on the MatekF765-Wing
- fixed a bug with sending data on a full UART in mavlink parameter download
- fixed use of UAVCAN primary GPS with UART secondary GPS
- fixed failover between rangefinders of same orientation
- added RC option for TAKEOFF mode
- fixed logging of current on secondary battery monitors
- fixed register checking on DPS280 for mRoControlZeroF7
- added clock panel to OSD
- fixed B/E led brightness on Pixhawk4
- support RTCM injection to UAVCAN GPS for RTK support
- fixed an RC failsafe bug that could cause the geofence to disable
- fixed a bug in the SDP33 airspeed driver
Thanks to everyone who tested the 4.0.1 beta release!
Happy flying!
2 Likes
I understand you and I know what can be done, but my problem is that I only have 12 channels and all are busy, if I have to use a channel just to change panels, it is a bit absurd. If the function I request, could be implemented, we would save a channel for those who do not use more than a single panel. Greetings
Hi,
first, thanks for the continuous development of this fantastic software.
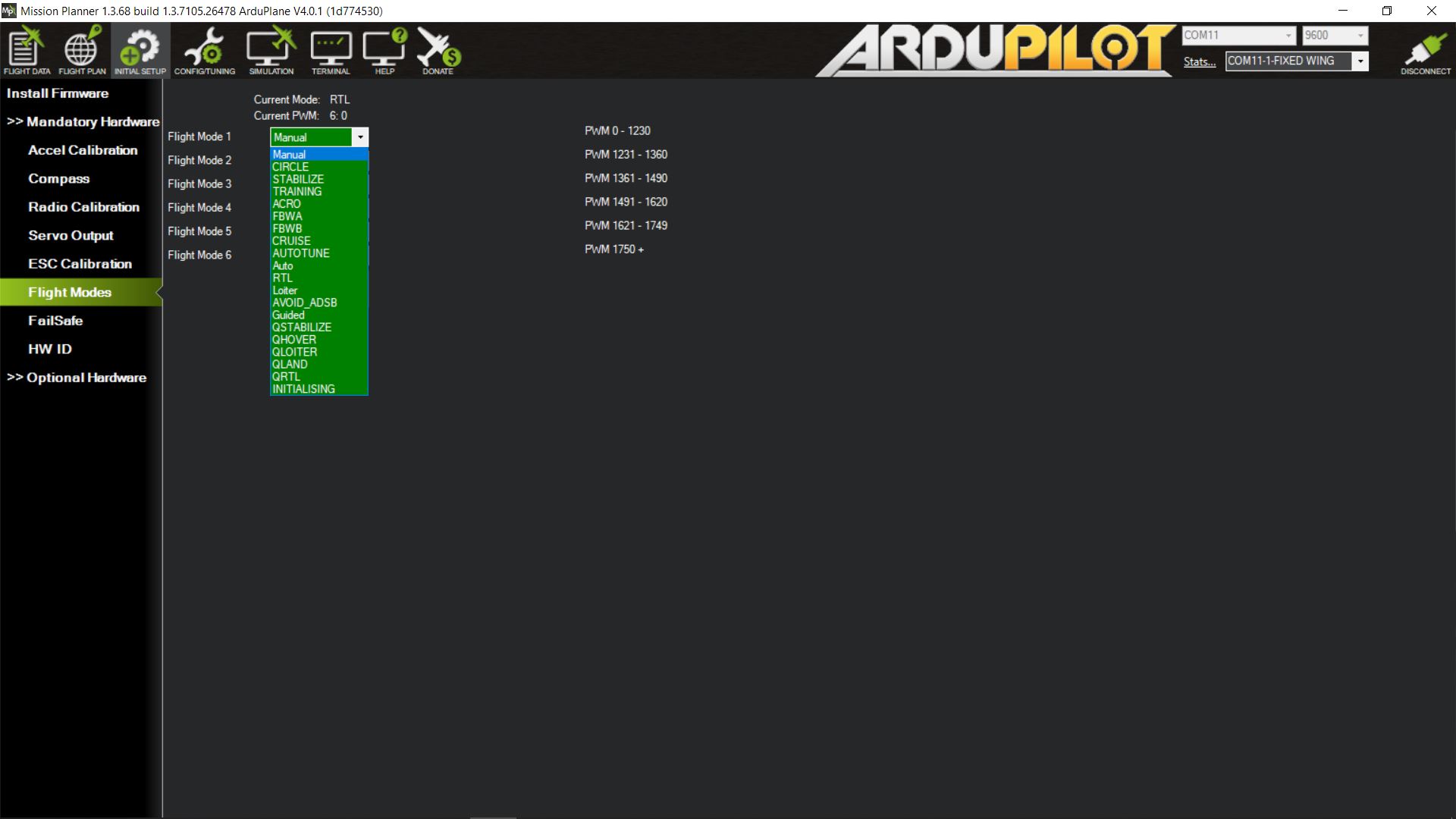
My question: I’ve installed plane 4.0.1 release but I don’t find the TAKEOFF Mode in the Flight Mode list.
Am I missing something ? Is it a parameter to set in Parameter List/Tree only ?
Corrado
Hi Dave,
thank you.
Greetings
Hi,
Have you checked how the auto takeoff procedure of the MyFlyDream autopilot works? Would be great to have something similar for hand launch.
Hi Corrado- I have enabled Takeoff mode on a Nano Talon but only tested int indoors with no props and in the SITL. The props spin up from throwing acceleration so it should work. Weather is bad here to try it for real. I think if you have it working in a mission it will work as a mode.
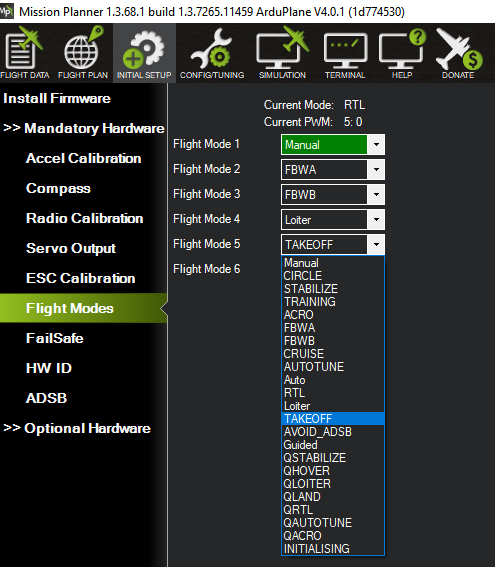
While it is possible that updating MissionPlanner will help, what you probably need to do is tell MissionPlanner to rebuild it’s parameters. Open the Control-F menu, then select “Param gen” (it is 7th down on the left side). Then leave MissionPlanner running for a couple of minutes. After that restart it and you should find that TAKEOFF has been added.
4 Likes
Done.
Now it works
Thank you
I’m not able (in v4.0.1) to find parameter SCR_ENABLE to start playing with the scripts (more specifically, to have more freedom for my in-flight glow plug igniter (winter is cold here!)). Is there something else that needs to be enabled to access scripting?
Also:
- Can scripts be updated remotely via MavLink?
- Are there any “spare” parameters (call it user params if you want) to be used in scripts? These could be easily changed from the ground station to give more flexibility to the scripts.
Thinking of a glow plug igniter, I’d could use one of these user parameters to store the PWM of the throttle below which I’d like the igniter to be on… It could then be easily adjusted from the ground station.
Hi Nicolau, which flight controller do you have?
For scripting the flight controller requires over 1 MB. SCR_ENABLE is therefore not displayed on a Pixhawk 1 or a Matek F405, on modern Pixhawks with 2 MB or, for example, the F765 wing, the parameter is visible.
Rolf
Hi Rolf. I’m using a Pixhawk 2.4.8… As far as I know, it has 2MB as per the STM32F427 datasheet (here on page 76).
Is there a way to see what is the actual hardware? With all these clones around, I sometimes don’t trust what the seller says and in their web they have the same product with different specs 
Older Versions signed V1 or V2 on the chip had a bug with only 1 MB usable.
Arduplane compiles two versions: Pixhawk 1 and Pixhawk 1-2MB: http://firmware.ardupilot.org/Plane/stable/