Bonjour à tous, je possède un pixwhak black et un Lidar.
Je souhaite activer le Lidar comme anti collision.
Par contre impossible d activer le Lidar.
Pouvez vous m aider ?
Merci à tous !!!
Bonjour à tous, je possède un pixwhak black et un Lidar.
Je souhaite activer le Lidar comme anti collision.
Par contre impossible d activer le Lidar.
Pouvez vous m aider ?
Merci à tous !!!
No, we can not help you. You do not provide enough information about the problem.
what information I can give you ?
What flight controller are you using? Exact manufacturer, make and version please.
What Firmware version have you installed on that flight controller?
What lidar model are you trying to use? What version exactly?
How are they connected?
Take a picture of the connection and post it.
Post the ArduCopter .param parameter file.
Explain what you have tried, and why do you think it does not work.
Slt Chris j’avais le même problème il y a quelque jours. Quel est le lidar que tu souhaite utiliser et comment tu la branché au pixhawk ?
google “arducopter supported lidar” and you’ll get:
https://ardupilot.org/copter/docs/common-rangefinder-landingpage.html
Salut Pierre ! j ai le laser lw20C. pour le branchement je te fais une photo si tu veux? tu me connais d où ? Merci à toi…
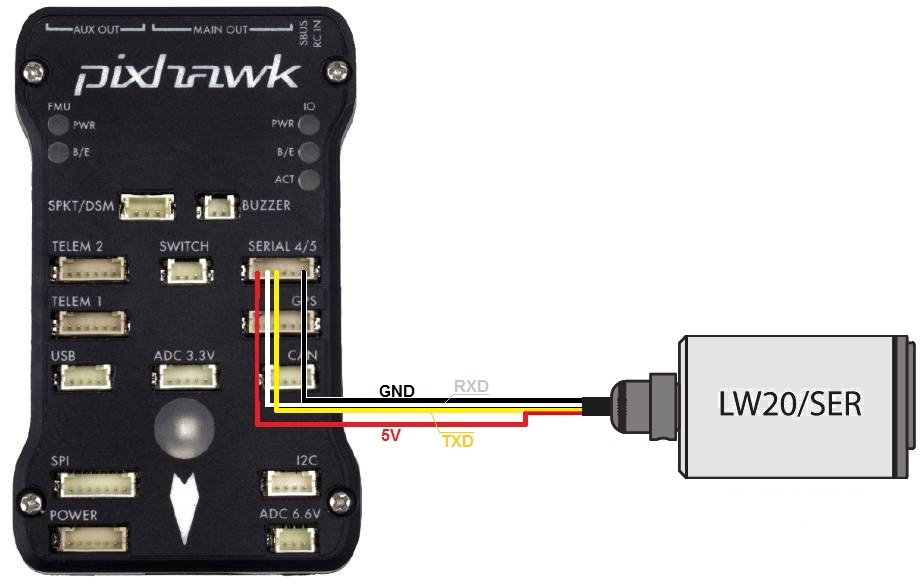
Ya pas de soucis Chris. Tu peut me faire une phot si tu veut mais voici le bon branchement
(j’avais le même soucis que toi et en branchant mon lidar de cette façon sa a marché)
Sinon to nom est marqué sous ton pseudo. On ne se connais pas en vrai
Pierre merci beaucoup .
Je regarde ça en entrant et te dis.
Bien joué pour le prénom ! J avais pas vue !
Je début sur ce forum et j ai pas tout pigé encore .
Haha oui le forum n’est pas simple à comprendre au début mais tkt tu vas t’y faire rapidement. Pour ta config je te conseillerais plus tôt de brancher ton lidar comme le schéma que je t’ai envoyé. Parceque le port i2c2 ne fournit pas du courant ducous tu devrais être contraint de souder les câbles 5v et grnd à ton pdb mais pour faire simple branche tout sur le port serial 4/5 ( n’oubli pas de regarder quel fil vas où dans le port) et sur ardupilot tu devra faire sa :
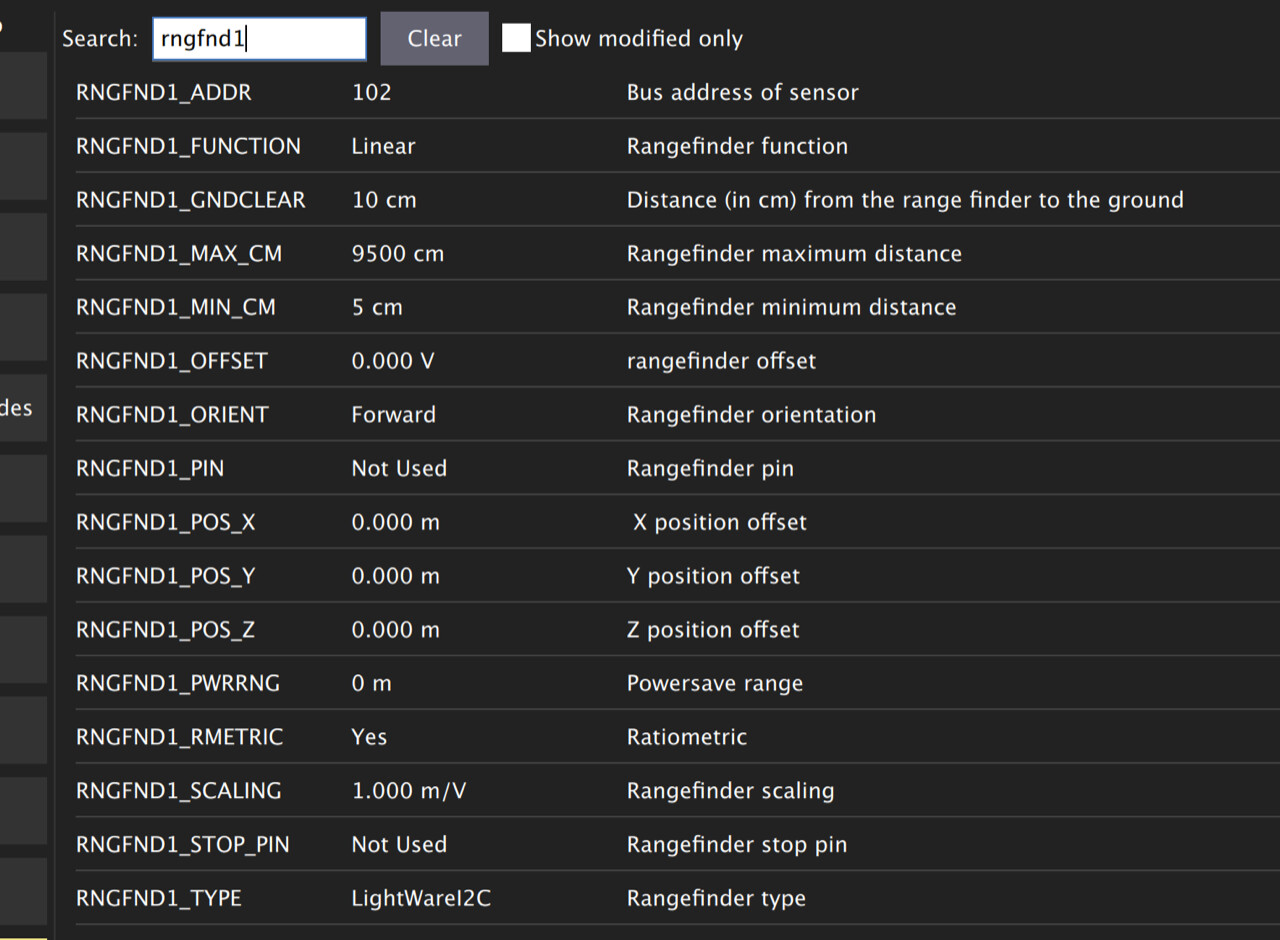
RNGFND1_TYPE = 8
RNGFND1_SCALING = 1
RNGFND1_MIN_CM = 5
RNGFND1_MAX_CM = 9500
RNGFND1_GNDCLEAR = la distance en cm du lidar vers le sol quand le drone est au sol
SERIAL4_PROTOCOL = 9
SERIAL4_BAUD = 115
Si jamais tu ne peut pas brancher sur le serial 4/5 ( et donc le brancher sur i2c) tu doit fournir du courant au lidar et entrer d’autre paramètres. Tien c’est un une documentation bcp plus claire qui t’expliquera tout en détail LightWare SF20 / LW20 — Copter documentation
Ok ça marche je vais modifier ça .
Pour le Lidar je souhaite qu il soit diriger vers l avant pour activer une v’barriere virtuelle . C est les mêmes commandes ? Merci à toi
Envoyé de mon iPhone
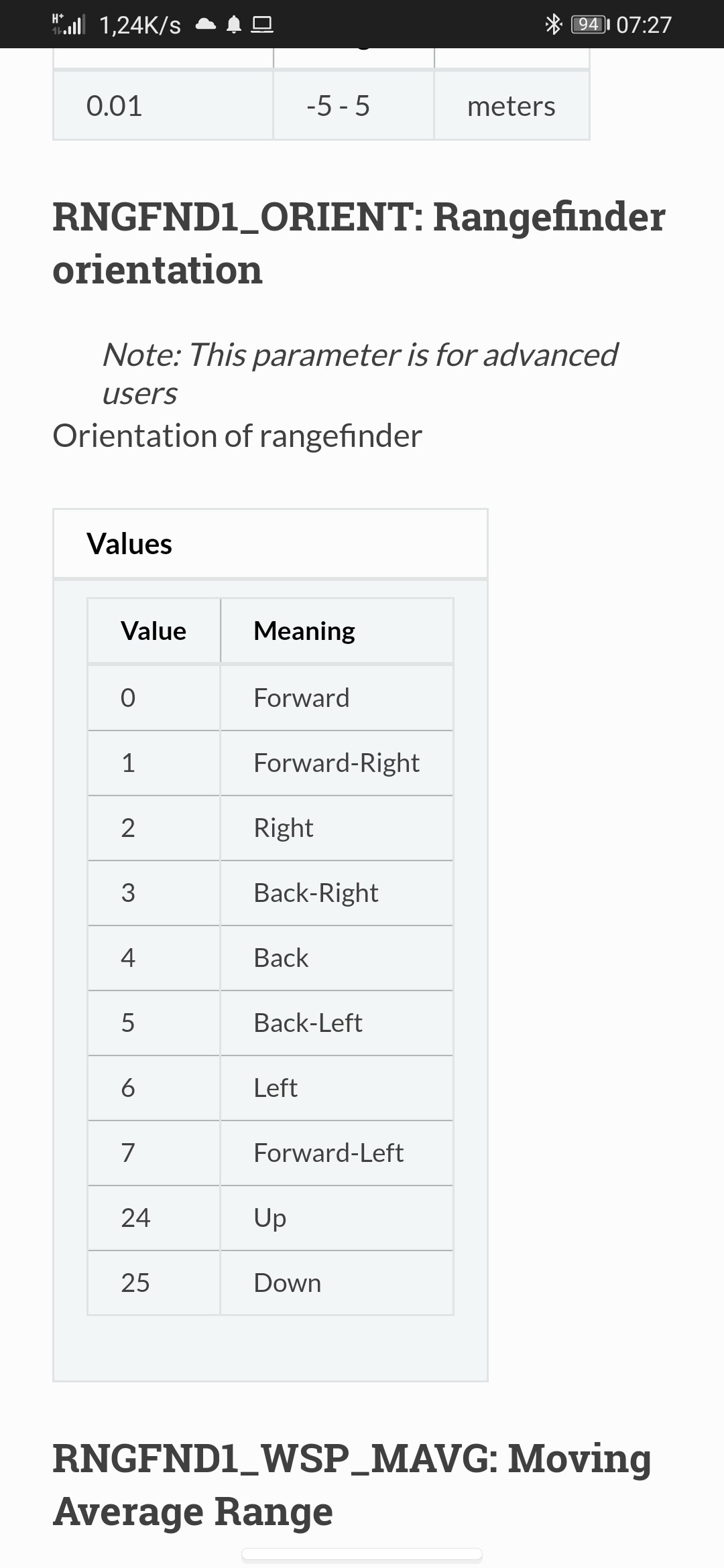
Oui se sont les même commandes mais pour dire au pixhawk que le lidar est vers l’avant :
RNGFND1_ORIENT = 0
Si jamais tu veut changer sa position voici une petite liste de commandes pour sa :
Cool merci
Envoyé de mon iPhone
Salut pierre.
Toujours pareil.
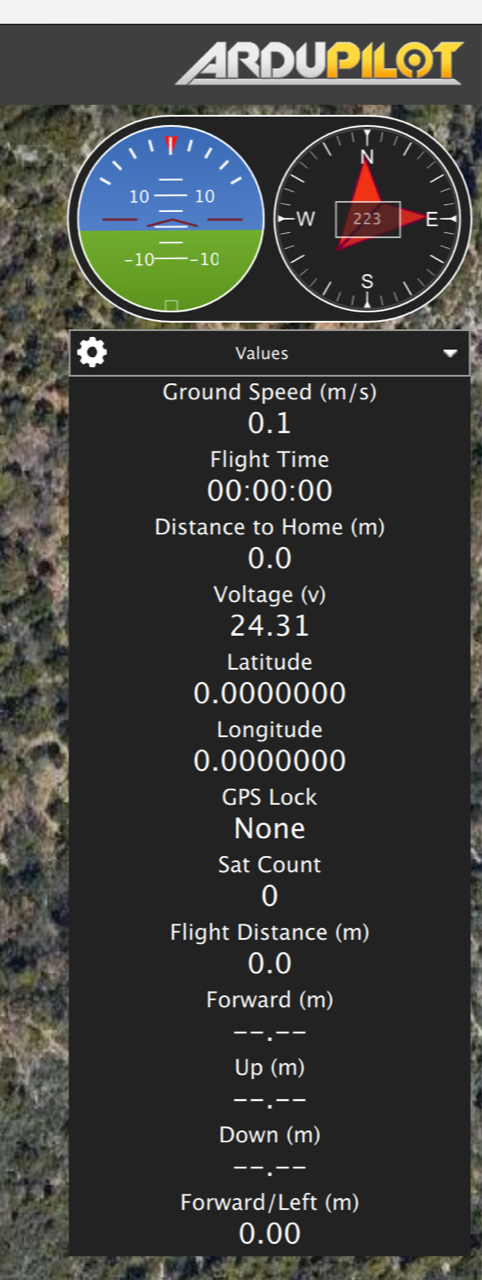
J ai bien suivi toutes les indications et là je ne vois plus .
Regarde mes reglages
Salut Chris,
Si tu a bien branché le lidar au port serial 4/5 le lidar devrait être alimenter. Ta essayer avec la batterie branchée ?
Si oui peut être que ta oublier ces paramètres:
Hello Pierre ! Oui j ai pas activé ces infos .
Par conte j ai pas de port 4.
Je suis en i2c .
Envoyé de mon iPhone
Si tu est en i2c deja quelques paramètre sont différents et tu doit alimenter ton capteur avec une autre source ducous. Parceque le port i2c ne transmet pas de courant