Hello, everyone. It’s been 2 weeks since I started learning about ArduPilot but I still have some confusion. I was practicing PixHawk and x8r by using L298N motor driver. I understand L29N’s enable and input pins.
Now I’m trying to connect PixHawk and X8R by using sabertooth motor driver. I want to implement a skid steering that can also accept PWM to control the speed. However, I don’t understand sabertooth’s pins to where I can connect to implement the forward and reverse (Unlike in L298N where the Enable is the PWM, and two pins for one motor and then you play with either’s 5v and ground to implement forward and reverse).
I have already enabled servo_functions to 73 and 74 in the mission planner.
Can anyone help me? I’ve been trying to look for a schematic diagram but I can’t seem to find one. The explanations that I find are also lacking. Thanks a lot
You should set it to “no mixing/independent” control, “microcontroller PWM” input and the battery type you are using.
It has no direction or enable pin, since it does not use a H-bridge chip.
There is a S1 and S2 pin/screw terminal for the left/right input signals, +5V (do not connect) and ground.
Ardurover needs “MOT_PWM_TYPE” set to “Normal” in the full parameter list.
Oh sorry.
So, X8R’s SBUS is connected to PixHawk’s RCIN. My transmitter is FrSky Taranis.
This is a nice note`
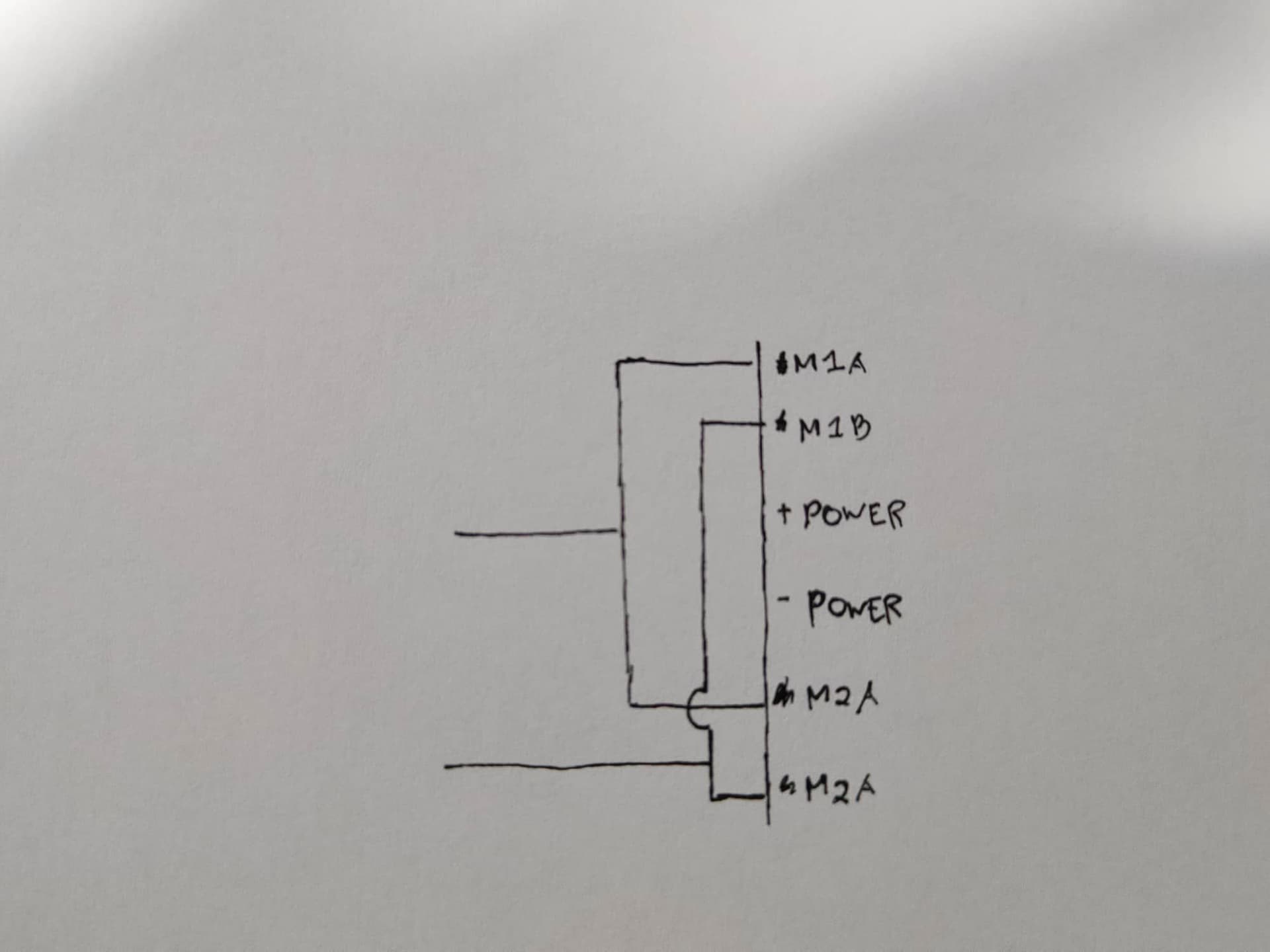
I can’t seem to know where to connect the Pixhawk’s Main Out 1 and 3 to the Sabretooth. I’m also trying to apply the concept of L298N’s input pins about forward and reverse to the sabretooth. I can try making a parallel pin like this one. (The last one is M2B not M2A, sorry)
Do you have a Sabertooth? Or are you just planing to buy one?
Again the Sabertooth has 4 pins to connect to a signalsource (Pixhawk in your case).
Two signal input pins, 5V and ground.
Pixhawk MainOut 1 signal pin goes to Sabertooth signal pin 1. MainOut 3 signal pin goes to Sabertooth signal pin 2.
Then connect any Pixhawk MainOut ground pin to the Sabertooth ground pin.
You do have to configure the Sabertooth first, of course.
It has nothing in common with an H-bridge controller and the way it is connected.
Oh, now I get it. L298N and Sabertooth are really that different.
And I already bought one and I’m expecting it to arrive this week. So I tried to get an overview to lessen the time of getting the job done. But if ever I come across any questions, is it okay to direct it to you?